Abstract
The communication demand for ground communication systems is growing with the rapid development of wireless communication technology. Unmanned Aerial Vehicles (UAVs), as communication air relay nodes, can provide wide coverage communication for ground moving target (GMT). In this paper, we develop a dynamic topology adjustment system based on communication demand and resource allocation, aiming to minimize the average weighted energy consumption of GMTs and UAVs, as well as the constraints imposed by the ground target motion, communication resource allocation, and UAV flight trajectory scheduling. Since communication demand and variable time are coupled, the Shannon-Hartley theorem is employed to calculate the required transmit power, which helps in measuring the maximum data amount based on time slot, and channel gain and target index in the UAV link, and quantifying the communication energy consumption. The communication energy consumption is continuously updated during the mission execution time progress, which requires us to re-estimate the position of the UAV to ensure the accuracy and efficiency of the communication. The 0-1 programming is adopted to determine the travel direction of the UAV. The waypoints are solved by discrete inference and dynamic optimization of weight factors through the CTRV model, so as to realize real-time monitoring of UAV motion and channel usage by dynamically adjusting the UAV according to the GMT's communication resource demand. Simulation experiments verify the effectiveness of the proposed method. The results show that with the high-density access of UAVs, the efficiency and reliability of UAV communication are significantly improved, and the communication interference and packet loss rate are significantly reduced, thus the communication efficiency, data processing speed and security of the UAV system are enhanced.
1. Introduction
UAVs have been widely used in scenarios such as strategic support and emergency communication because of their high flexibility and low manufacturing cost [1]. In these application scenarios, UAVs are required to not only collect data, but also have the ability of data processing [2], which is specifically reflected in the UAVs’ automatic perception of task targets. Previous studies [3] have comprehensively outlined UAV-based target detection and tracking technologies. Wu et al. [4] used infrared technology to detect small targets, focusing on the accuracy of target detection within the dataset. Nguyen et al. [5] recruited nearby UAVs to form perception and computing task groups to collaborate on data perception, collection and processing. Yang et al. [6] developed a dynamic mission planning method based on local particle swarm optimisation to enable UAVs to adjust their trajectories based on real-time environmental inputs.
However, the imbalance between the supply and demand of computational resources and the duplication of sensed data leads to additional computational and communication overheads and increased end-to-end processing latency [7], which has led to a significant amount of research into the integration of UAVs into more advanced network architectures to address such issues [8].
Previous research [9] dynamically adapts the network architecture according to the movement of UAVs while improving the flexibility of deploying communications by [10] proposing a distributed algorithm for regular topological movement of UAVs and [11] proposing an algorithm for deployment of UAVs according to the need of communication coverage based on the above mentioned research literature [12] uses UAVs for loading the servers and providing auxiliary communications to the decentralised GECs.
In UAV-assisted communication, resource (including energy, computation and time) consumption of UAVs will be a significant issue. Previous research [13] focused on minimising the total energy consumption of UAVs and ground equipment, further truncating the system energy consumption by optimising the UAV trajectory and resource allocation thereby significantly reducing the energy cost of mission offloading. In [14], an auction and consensus based multi-task resource allocation study as well as a game based multi-task resource allocation study are proposed, which consider the mutual independence between resource demands, but do not consider the linkage between resources when coupling resources, which may lead to an ineffective heterogeneous resource scheduling process. In [15], on the other hand, a bionic-based multi-intelligence independent reinforcement learning approach is used to design a dynamic adjustment process of heterogeneous resources between different tasks through the diffusion of task scenario information updating, which improves the efficiency of resource collaboration. The authors of [16] proposed resource allocation decisions through local task information, which effectively reduces task execution time and improves computational resource utilisation.
To further achieve energy optimisation, literature [17] models edge computing networks supported by wireless power transfer techniques, [18] uses stochastic online learning methods to apply the modelled network to non-stationary environments to achieve real-time observation, and dynamically adjusts the task resource requirements through real-time observation to achieve the optimal allocation of resources during task execution. Previous research [19] proposes to perform task thread queuing in mobile devices with stochastic computing tasks to reduce the extra overhead due to task switching. The authors of [20] applied game theory to achieve a trade-off between execution time and energy consumption to dynamically adjust the task execution order. The authors of [21] propose the optimal execution delay and energy consumption under the optimal order of task offloading, but do not consider improving the task offloading rate. In [22], on the other hand, they focus on the offload rate maximisation problem, proposing to increase the transmit power in order to minimise the task completion time of the UAV, but exacerbating the interference with other communications and increasing the energy consumption. The authors of [23] propose joint edge computing and mobile communications to minimise UAV energy consumption. The joint optimisation problem of UAV trajectory and communication allocation is explored in [24]. Resource optimisation for multiple users in UAV-assisted communication is investigated in [25], which jointly solves computational offloading, UAV trajectory and user scheduling, however the size of on-demand tasks is a stochastic variable that cannot be quantified, so a stochastic model is introduced to quantify the computational tasks in [26] but at the same time leads to a significant increase in computation. The authors of [27] propose that high density deployment of UAVs serving a region simultaneously can significantly increase the speed of task flow processing. However, whether the co-operation between the above technologies will improve the performance of UAV-assisted GMT networks, a complex system that needs to be studied in depth to fully utilise its potential, inspired the work in this paper.
Existing methods for discrete optimisation modelling by establishing distance grid points as waypoints within the detection range, resulting in a sequence of UAV waypoints as complex non-linear modes leading to excessive computation and difficult to solve in real time. Previous studies have often treated communication resource allocation and UAV trajectory design as two relatively independent problems, which has caused great difficulties in model solving.
In this paper, a measurement system is built based on the inter-correlation properties of UAV communication allocation and trajectory design. The Shannon-Hartley theorem is used to calculate the required transmit power. The maximum amount of data transmitted is measured and the communication energy consumption is quantified by the gain of the transmit power over the channel in the time slot and the GMT index. The direction of travel of the UAV is determined based on the measurements combined with the 0-1 programming. The CTRV model is introduced to model the UAV in continuous space, and the model is discretised by time intervals. The CTRV model is able to better describe the flight state of the UAV, including the position, velocity, yaw angle and angular velocity, etc., and at the same time, the UAV's turning characteristics and flight constraints are taken into account. Through discretised reasoning and dynamic optimisation of weight factors, the system is able to solve the waypoints and realise the dynamic adjustment of UAV motion according to the communication resource demand of GMT.As the communication energy consumption is continuously updated as the mission execution time progresses, the system is able to re-estimate the UAV position in real time and dynamically adjust the communication resource allocation and UAV flight trajectory.
2. Energy consumption model
Since the communication demand of GMT varies over time, in order to make the continuous process feasible for resource allocation, we use the sets G={1,2,...,G} and U={1,2,...,U} to index GMT and UAV, respectively. Although the whole computation process is continuous in time, the interval can be discretized into N(N>1) time slots of length τ. We define the set τ={1,⋯,N} to denote the time slots, and update the coordinates m of the UAV in each time slot, the corresponding position is calculated in Eq. (1):
In order to perform the assigned task ri(t), the GMT needs to transmit the power pl,i(t) to the UAV at time slot t. The bandwidth of each channel is W Hz. According to the Shannon-Hartley formula [27], the transmit power of the task can be obtained in Eq. (2):
where σ2 denotes the noise power, further yielding the energy consumption of the task in time slot t in Eq. (3):
The GMT sends communication requirements to the UAVs, expressed as channel gains within time slot τ. Therefore, each UAV has a task list updated over time, denoted as Rm[τ]={rm1[τ],rm2[τ],...,rmk[τ]}, where rmk[τ] denotes the target index of the kth smallest channel gain in time slot τ with the UAV link m. Assuming that the transmit power used by the ground target rmk[τ] to offload the communication task to the UAV m is prk,m[τ], the maximum amount of data that can be offloaded to the UAV m by the ground target rmk[τ] in the time slot τ of reference [12] can be expressed in Eq. (4):
where is the bandwidth allocated to each GMT, is the power spectral density (PSD) of the additive Gaussian white noise at the device reception, and denotes the channel gain. Then the total energy cost of the UAV is calculated in Eq. (5):
We calculate the total energy consumption of the system by summing the communication energy and flight energy in time period in Eq. (6):
where and are the energy consumption weight factors of GMT and UAV, respectively, and .
The weights are adjusted according to the actual situation to satisfy the prioritized energy demand and achieve the optimal energy consumption of GMT and UAV. is a penalty factor for flight energy consumption that serves to mitigate the magnitude difference. The UAV position will be estimated again due to the update of the communication energy consumption, which involves factors such as radio and computational resources and the trajectory of the UAV. Therefore, weighting factors are needed to adjust the priority of the different components in the optimisation.
Taking the mission priority as a criterion:
(1) If the Ground Moving Target (GMT) is more mission-critical and needs to be prioritised to ensure its communication quality and energy control, then the value of the GMT energy weighting factor can be increased appropriately.
(2) If the mission and resource allocation of the unmanned aerial vehicle (UAV) have a greater impact on the operation of the whole system, or if the energy supply of the UAV is relatively easy, then the value of the UAV energy consumption weighting factor can be increased appropriately.
3. UAV trajectory design model
3.1. UAV traveling state
The UAV is denoted as . According to [28], state of at the moment is expressed in Eq. (7):
where denotes the position information of UAV at moment .
denotes the direction information of the UAV, and the eight numbers denote the eight directions of the UAV, as can be seen from Fig. 1 [30].
Fig. 1The direction of UAV traveling
a)

b)
c)
Considering the UAV’s own flight requirements as well as communication constraints, the UAV’s state transition will be affected by the turning characteristics, so after the UAV’s direction is determined at the moment , there are three possibilities of directions that can be chosen at the moment , and the direction transformation of the UAV can be expressed in Eq. (8):
where represents the direction decision control variable of UAV at moment , and represents the direction of UAV at moment .
Taking the group of UAVs performing the search task as a control system, the state of the system at moment can be expressed as , achieving Eq. (9):
denotes the UAV group direction decision-making control variable at the moment . In the target range, the state equation of UAV at the moment is transformed to Eq. (10):
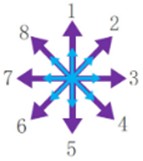
where maps to a 0-1 array. The mapping relationship between , and 0-1 array is shown in Fig. 2 [6].
Fig. 2The UAV traveling state
3.2. The UAV CTRV model
The waypoints of UAVs can serve as decision variables. Analysis of reference [17], the Constant Turn Rate and Velocity (CTRV) model is chosen to conduct continuous spatial modeling of the UAV, and the model is discretized by time intervals, and the turn rate and velocity variables at different time nodes are used as the decision variables. The tuple of the sequential decision variables is in Eq. (11):
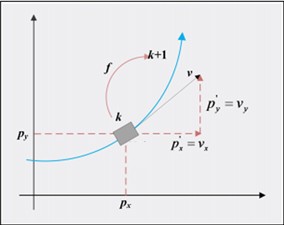
where is the horizontal coordinate, is the vertical coordinate, is the velocity, is the yaw angle, is the angular velocity and is the current state vector of the UAV.
Assuming that the previous moment is , the corresponding state vector takes the value of , the next moment is , the time interval is , and the corresponding state vector takes the value of , we can achieve the state transformation equation as Eq. (12):
Which is then transformed into the form of separate integrals for each component in Eq. (13):
The corresponding geometrical significance of each parameter is shown in Fig. 3.
Fig. 3Geometrical significance of each parameter
3.3. Recursive formula for discretization of the CTRV model
The CTRV model takes a constant rate of turn, i.e., the rate of change of angular . With an equally spaced sampling interval, it can be approximated that the UAV takes a constant velocity and a constant angular velocity during that interval. Then the recursive formula for discretized motion is achieved as Eq. (14):
where .
3.4. UAV waypoints and decision vectors
We take a fixed value of angular velocity in the interval between neighboring waypoints, and the sequence consisting of is used as a decision vector, to achieve Eq. (15):
where is the number of waypoints.
According to the previous analysis, waypoints are formed by equally spaced sampling intervals at time gap . We use to denote the waypoint, where is the time, is the -coordinate and y-coordinate of the th waypoint. is the moment of the last waypoint of the route and . Due to the spatial variability of waypoints, spatial coordinates for different waypoints are marked as , where is the waypoint, is the UAV, is the type of UAV and is the number of routes. Then, the path of waypoints is denoted in Eq. (16):
4. CTRV modelling combined with dynamic resource allocation
Unknown variables are optimised at each time slot, where no a priori information about past time slots is required except for trajectory scheduling. Thus, the proposed model and algorithm favour unpredictable environments. Workflows for the interplay between communication demands and trajectory updates.
1. Initialisation: set the initial position, speed, yaw angle, transmit power and other parameters of the UAV, as well as the initial communication demand of the GMT.
2. Demand Sensing: The UAV receives the communication demand information sent by the GMT through sensors or communication modules, including data volume, transmission rate, etc.
3. Resource Evaluation: The system evaluates the available communication resources, including spectrum resources, transmit power and remaining energy, based on the current communication demand and the state of the UAV.
4. Resource allocation:
(1) Using the CTRV model, predict the position and state of the UAV at the next moment based on its current position and speed.
(2) Discretise the continuous flight trajectory and decompose it into a series of waypoints, each of which includes time, position and flight state.
(3) Based on communication needs and resource assessment results, use 0-1 planning to determine the UAV's flight direction and mission execution decisions at each waypoint, and dynamically allocate communication resources to meet GMT communication needs
5. Multi-aircraft collaboration: each UAV broadcasts its position and remaining energy periodically, exchanges mission and status information between UAVs through communication mechanisms (e.g., broadcasting, multi-hop communication, etc.), and allocates communication resources through the mission priority when executing the mission. In order to avoid communication interference, frequency division multiplexing technology is used to manage the communication channel.
Trajectory scheduling involves determining the position of the UAV from the initial position to the final position of all the time slots, and the first part of the objective function is to minimise the sum of the flight energy consumption of all the time slots, not the flight energy consumption of one time slot. In other words, a complete flight trajectory can be obtained by solving problem Eq. (17):
where is the set of UAV time slots. , is the channel power gain at the reference distance:
where denotes the energy consumption of the UAV at the th waypoint and denotes the total number of waypoints.
Constraints: Constraints include communication requirement constraints, resource constraints, and flight characteristic constraints. Include the following conditions:
(1) Communication requirement constraints: ensure that the communication requirements of each GMT are met.
(2) Resource constraint: the UAV’s transmit power and residual energy must not exceed the maximum value.
(3) Flight characteristic constraints: the UAV’s turn rate and speed must be within reasonable limits. Here the flight energy consumption is determined only by the velocity vector, expressed as the velocity vector of the UAV flight defined as the ratio of the distance increment of the UAV in the horizontal plane to the time gap, and flying at a constant altitude has no effect on the gravitational potential energy consumption.
6. Communication execution: the UAV executes the communication task with the GMT according to the planned trajectory and mission decision. During the communication process, the communication quality and resource consumption are monitored in real time.
7. Feedback and Evaluation: After the communication task is executed, feedback information is collected, including the communication success rate, data transmission volume, and energy consumption. Based on this feedback information, the performance of the current trajectory and resource allocation scheme is evaluated.
8. Iterative update: If the performance does not meet the requirements, such as communication interruption and high energy consumption, the system will re-enter the demand sensing phase and start a new round of trajectory update and resource allocation process. If the performance meets the requirements, the current trajectory and resource allocation scheme will continue to be executed until the task is completed.
Computational complexity: The computational complexity of the algorithm depends mainly on the number of decision variables and constraints.
Time complexity: For a 0-1 planning problem with n waypoints, the worst case scenario requires searching for possible combinations. Therefore, the time complexity is .
Space complexity: The space complexity depends mainly on the memory required to store waypoint information and decision variables. For waypoints, binary variables need to be stored, hence the space complexity is .
5. Simulation and experiment
Based on the algorithm and motion model above, we set up an air-ground collaborative experiment consisting of multiple unmanned vehicle communication relays and UAV mobile base stations to measure the cross-correlation characteristics of communication allocation and trajectory design in a multi-UAV system. The slight displacement of the UAV causes the channel conditions to change significantly, specifically the communication link varies between line-of-sight and non-line-of-sight with pitch angle. In the experiment, we assume that 8 GMTs are uniformly distributed in a 1×1 km2 square area, and each GMT has a task volume of 150 Mbits. Four UAVs are used to provide communication distribution for the GMTs, and the altitude is fixed at 50 m. The initial coordinates of the 4 UAVs are (0, 0, ), and the final coordinates are (0, 1000 m, ) and (1000 m, 0, ). The entire interval is sampled every 5 s. Simulations are verified based on the measured data to observe the gain ascension of the communication demand in the channel per unit time.
Fig. 4Measurement of intercorrelation characteristics for communication allocation and trajectory design based on UAVs
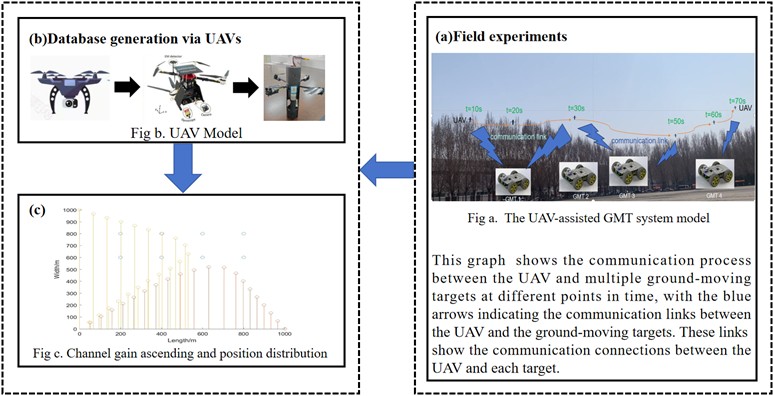
In Fig. 4(c), the yellow dots in the center represent the location of the GMT, and the blue dots represent the waypoints of the UAV.
The distribution of these points demonstrates the layout of the GMT in space. The dots represent data at different points in time, and the order of the dots can be used to analyze the trend of the UAV’s movement over time.
Each GMT is ranked in ascending order of channel gain in each time slot, and the overall distribution of points scored is observed, such as the areas of apparent concentration or dispersion. The results show the overall distribution of transmit power over different target demands and time slots.
This paper extends experimental conditions involving urban environments, high-density missions or dynamic obstacles for a comparative evaluation of UAV coordination strategies.
In the experiment, it is assumed that the initial coordinates of the four UAVs are (0, 0, ) and the final coordinates are (0, 1000 m, ) and (1000 m, 0, ), respectively.This symmetric and regular initial position setting allows the UAV to cover the target area relatively uniformly during flight, which facilitates the study of communication allocation and trajectory design effects under ideal conditions.
Different initial positions lead to uneven coverage density of the UAV in the target area, which affects the communication efficiency and energy distribution. It makes it necessary for the system to adjust the UAV trajectory and communication resource allocation more frequently to balance the energy consumption and communication load of each UAV.
Flight altitude affects the quality of the communication link between UAVs and Ground Moving Targets (GMTs). The communication coverage of UAVs at low altitudes is reduced. This means that each UAV needs to adjust its position more frequently to maintain coverage of the target area, which will increase the UAV’s flight energy consumption. At the same time, due to reduced coverage, more UAVs may be required to fulfil the same task, or the UAVs may need to perform more intensive communication tasking over a smaller area.
While the communication coverage will increase at higher flight altitudes, the signal transmission loss will also increase. This may result in UAVs requiring higher transmit power to maintain the quality of communication with the GMT, thereby increasing communication energy consumption. In addition, higher flight altitudes may be affected by more airborne environmental factors, such as wind speed and direction, which can pose greater challenges to UAV flight control and trajectory planning.
Fig. 5Dual machine collaboration experiment
a)

b)

c)
d)
Fig. 6Parabolic UAV group experiment

a)

b)

c)
d)
Fig. 7Multi-drone group experiments on rainy days

a)

b)

c)
In real environments, the flight path of a UAV may be affected by a variety of factors, such as obstacles, no-fly zones, dynamic air traffic, etc., resulting in irregular paths. In this case, the UAV needs to adjust its flight path in real time to avoid obstacles and no-fly zones, which will increase the complexity and computation of path planning. Meanwhile, irregular paths may lead to frequent changes in the communication distance and channel quality between UAVs and GMTs, requiring more flexible communication resource allocation strategies to accommodate such changes.
In urban environments with a large number of buildings and moving obstacles, the UAV flight path needs to be adjusted in real time to ensure safety. This not only increases UAV flight energy consumption, but may also affect communication continuity and stability. When UAVs need to bypass buildings, they may temporarily lose direct communication links to some GMTs and need to relay communications through other UAVs, which will change the allocation of communication resources and energy consumption patterns.
Comprehensive evaluation of system performance based on the energy efficiency of each UAV, enabling the integration of multi-modal and real-time data.
Fig. 8Energy consumption of a single UAV
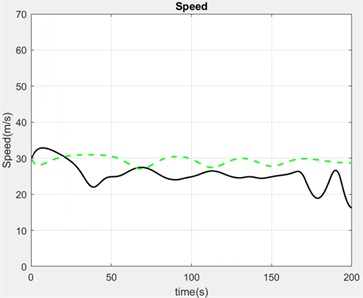
As shown in Fig. 8, the black solid line indicates the power output, the overall fluctuation is large, but the overall over time is energy-saving trend and the speed is relatively low and small fluctuations, in order to ensure the stability of the communication connection between the UAV and the ground equipment, through the reception of the sensor data, the algorithms of this paper processed by the control commands issued by the actuator to adjust the dynamic deployment of the UAV, as well as to support the collaborative operation of the multi-UAV system and group network communication.
The green dashed line indicates the change in energy consumption with speed fluctuation at a given time. It can be seen that the speed that achieves the minimum energy consumption at a given time has a relatively stable overall speed, indicating that the UAV operates in a more energy-efficient manner most of the time
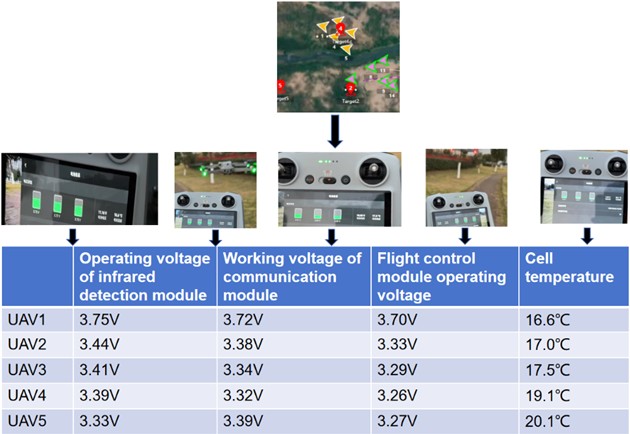
Discusses the possibility of integrating infrared detection sensor data into a trajectory optimisation framework and its impact on communication allocation. As shown in Table 1, infrared detection devices can capture and process data in real time, providing immediate feedback. The all-weather observation capability enables it to maintain high detection performance even in bad weather.
Visualisation of UAV trajectories, energy consumption patterns and resource allocation processes, i.e. quantified as visual signals (voltage, operating temperature), when multiple UAVs are working together, the system energy consumption and allocation role processes are monitored by monitoring the voltages and operating temperatures of the three parts of the infrared detection module, the communication distribution module and the flight control module.
The model increases the communication protocol configuration module to dynamically adjust the communication parameters in the model according to the communication protocols actually used. For example, for 5G protocols, the calculation of parameters such as channel gain and noise power, as well as the allocation strategy of transmit power, can be adjusted according to their high bandwidth and low latency characteristics. In this way, the model can better adapt to different communication protocols and improve its applicability in the actual communication environment. The communication resource allocation is dynamically adjusted according to the transmit power of GMT communication demand, and the power change over time is shown in Fig. 10.
Table 1Integrating infrared detection sensor data
Technical index | Sensor data | Impact of data |
Operating frequency band | 3 μm-5 μm | The thermal infrared band of this band has the highest atmospheric window target radiation energy and is the most critical band in infrared detection technology |
Maximum tracking angular velocity | ≥ 30°/s | In high-speed maneuvers, the relative position of the target changes rapidly, and the high tracking angular speed can capture these changes in time, so as to track and communicate feedback more effectively |
Maximum detection range | ≥ 8km | The farthest distance the target is detected is affected by the target's infrared radiation intensity, background noise and detection sensitivity |
Rate of communication between drones | ≥ 400 Mbps | The communication rate affects the interaction of mission information between multiple UAVs, including mission location, data volume, priority, etc., so that resources can be allocated more accurately |
Fig. 9Visualisation of resource allocation for multi-computer collaboration
Based on the results of trajectory planning and 0-1 planning, dynamic allocation of communication resources is achieved by adjusting the transmit power in order to ensure communication with ground targets between the stable link and the UAV. During the communication process, the system continues to monitor changes in communication requirements and resource consumption to provide a basis for the next trajectory update and resource allocation.
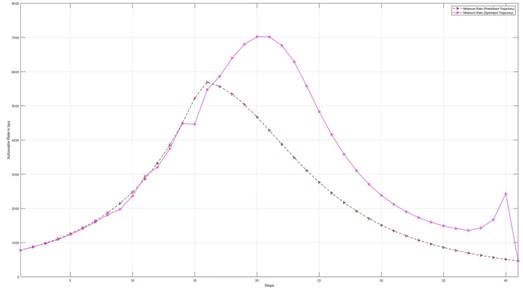
In Fig. 10, the average power of the dataset for the optimal trajectory and the predicted trajectory changes over time. The optimal trajectory is marked in pink. The power is low at the beginning and increases gradually with time, peaking at 6000 bps in the middle of 21 s, then starts to decrease and stops the ground-to-air communication after the presence of a small fluctuation at 40 s and the power drops to 0.
The predicted trajectory is marked in black. It peaks at 5800 bps at 16 s and then jogs down to 0. The prediction is a good fit to the optimum by 15 s, but the subsequent fit is poor because the prediction does not take into account practical factors such as NLOS masking.
The large-scale UAV network model assigns different priorities or frequency band resources to its different protocols to reduce interference between protocols. Meanwhile, the collaboration mechanism between protocols can be studied, such as through protocol conversion or fusion, to improve the overall communication efficiency of the network.
Fig. 10GMT communications transmit power
For tasks that require high reliability, a star topology can be used, with a central node for resource allocation and coordination; while for tasks that require high scalability and flexibility, a mesh topology can be used, with each UAV having certain resource allocation and decision-making capabilities. The adaptability of the model to different network topologies is improved by introducing topology identification and switching mechanisms into the model.
A hierarchical processing mechanism is used to classify network loads into different levels, and prioritise and process them according to the urgency and importance of the loads. For high-priority tasks, more resources and better communication links can be allocated; for low-priority tasks, processing can be appropriately delayed or simplified. At the same time, a certain amount of resources is reserved as a buffer to cope with unexpected high load situations and to ensure the stable operation of the network.
We adjust the weighting parameters and , increase the number of UAVs, and measure the communication efficiency and data processing speed in real time. Quantify the evaluation criteria as time in sec. The result is shown in Fig. 11.
Fig. 11Average flight time and task implementation time influenced by numbers of UAV
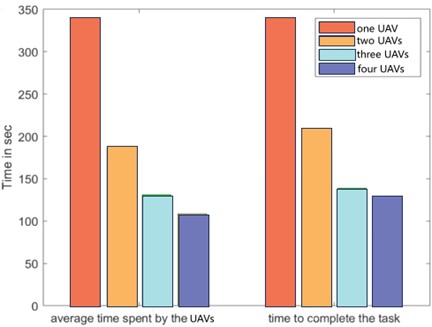
After tuning the parameters, the optimal energy consumption is achieved at , . The number of UAVs is set from 1 to 4, and the results are as follows:
1) As the number of UAVs increased from 1 to 4, the average time decreased significantly, suggesting that more involved UAVs in a mission can reduce the average workload per UAV.
2) As the number of UAVs increases, the total time required to complete the task decreases, suggesting that increasing the number of UAVs can improve the efficiency of task execution.
3) Comparing the bars of different colors shows that increasing the number of UAVs can effectively shorten the task execution time, which further confirms the negative correlation between the number of UAVs and the time to complete the task.
4) The increase in the number of UAVs allows for tasks to be processed in parallel or for UAVs to collaborate with each other, thus increasing overall productivity large-scale UAV networks.
6. Conclusions
In this paper, ground target demand, communication resource allocation and trajectory scheduling are jointly formulated as an average weighted energy minimization problem in the UAV-assisted GMT system. The transmit power is computed via the Shannon-Hartley theorem, combined with time slot channel gain and target indexing to quantify the communication energy consumption, and the resource allocation is dynamically adjusted according to the changes in the communication channel quality.
The study integrates infrared detection sensor data into a trajectory optimisation framework and calculates a maximum tracking angular velocity greater than 30 °/s, the operating frequency band is 3 μm-5 μm, maximum detection distance not less than 8 km.
The UAV position and communication energy consumption are updated as the mission execution time progresses. The 0-1 programming and CTRV model discretization reasoning are applied to dynamically optimize the UAV waypoints so that the communication resource requirements of GMT can be adapted. The results show that with the high-density access of UAVs, the efficiency of individual drone communications has increased by 64 % and the mission completion rate has increased by 58 %. By optimizing the system parameters, an average weighted energy minimization scheme is achieved which in turn achieves optimal energy consumption and handles more tasks.
The division of tasks in real-life work is entirely determined by the allocation strategy, but the splitting of data should take into account the specific characteristics of the tasks. Arbitrary division may compromise the integrity of the data, so the more reasonable model should be used. Overall, this paper makes an important contribution to the study of UAV communication resource allocation and provides a valuable reference for future UAV resource allocation and energy optimisation.
References
-
Y. Shen, Y. Qu, C. Dong, F. Zhou, and Q. Wu, “Joint training and resource allocation optimization for federated learning in UAV swarm,” IEEE Internet of Things Journal, Vol. 10, No. 3, pp. 2272–2284, Feb. 2023, https://doi.org/10.1109/jiot.2022.3152829
-
M. Wang, R. Li, F. Jing, and M. Gao, “Multi-UAV assisted air-ground collaborative MEC system: DRL-based joint task offloading and resource allocation and 3D UAV trajectory optimization,” Drones, Vol. 8, No. 9, p. 510, Sep. 2024, https://doi.org/10.3390/drones8090510
-
X. Wu, D. Hong, and J. Chanussot, “UIU-Net: U-Net in U-Net for infrared small object detection,” IEEE Transactions on Image Processing, Vol. 32, pp. 364–376, Jan. 2023, https://doi.org/10.1109/tip.2022.3228497
-
X. Wu, W. Li, D. Hong, R. Tao, and Q. Du, “Deep learning for unmanned aerial vehicle-based object detection and tracking: a survey,” IEEE Geoscience and Remote Sensing Magazine, Vol. 10, No. 1, pp. 91–124, Mar. 2022, https://doi.org/10.1109/mgrs.2021.3115137
-
M.-N. Nguyen, L. D. Nguyen, T. Q. Duong, and H. D. Tuan, “Real-time optimal resource allocation for embedded UAV communication systems,” IEEE Wireless Communications Letters, Vol. 8, No. 1, pp. 225–228, Feb. 2019, https://doi.org/10.1109/lwc.2018.2867775
-
L. Yang, Y. Hao, J. Xu, and M. Li, “Multi-UAV collaborative target search method in unknown dynamic environment,” Sensors, Vol. 24, No. 23, p. 7639, Nov. 2024, https://doi.org/10.3390/s24237639
-
J. Xue, T. Zhang, F. Shao, J. Yao, and X. Xu, “Joint optimization of trajectory and resource allocation in cellular-connected multi-UAV MEC networks,” Physical Communication, Vol. 61, p. 102209, Dec. 2023, https://doi.org/10.1016/j.phycom.2023.102209
-
J. Ji, K. Zhu, C. Yi, and D. Niyato, “Energy consumption minimization in UAV-assisted mobile-edge computing systems: joint resource allocation and trajectory design,” IEEE Internet of Things Journal, Vol. 8, No. 10, pp. 8570–8584, May 2021, https://doi.org/10.1109/jiot.2020.3046788
-
X. Qin, Z. Song, Y. Hao, and X. Sun, “Joint resource allocation and trajectory optimization for multi-UAV-assisted multi-access mobile edge computing,” IEEE Wireless Communications Letters, Vol. 10, No. 7, pp. 1400–1404, Jul. 2021, https://doi.org/10.1109/lwc.2021.3068793
-
Z. Wang et al., “UAV-assisted mobile edge computing: dynamic trajectory design and resource allocation,” Sensors, Vol. 24, No. 12, p. 3948, Jun. 2024, https://doi.org/10.3390/s24123948
-
Z. Kuang, Y. Pan, F. Yang, and Y. Zhang, “Joint task offloading scheduling and resource allocation in air-ground cooperation UAV-enabled mobile edge computing,” IEEE Transactions on Vehicular Technology, Vol. 73, No. 4, pp. 5796–5807, Apr. 2024, https://doi.org/10.1109/tvt.2023.3334143
-
T. Tan, M. Zhao, and Z. Zeng, “Joint offloading and resource allocation based on UAV-assisted mobile edge computing,” ACM Transactions on Sensor Networks, Vol. 18, No. 3, pp. 1–21, Aug. 2022, https://doi.org/10.1145/3476512
-
Z. Yang, S. Bi, and Y.-J. A. Zhang, “Online trajectory and resource optimization for stochastic UAV-enabled MEC systems,” IEEE Transactions on Wireless Communications, Vol. 21, No. 7, pp. 5629–5643, Jul. 2022, https://doi.org/10.1109/twc.2022.3142365
-
M. Zhao, W. Li, L. Bao, J. Luo, Z. He, and D. Liu, “Fairness-aware task scheduling and resource allocation in UAV-enabled mobile edge computing networks,” IEEE Transactions on Green Communications and Networking, Vol. 5, No. 4, pp. 2174–2187, Dec. 2021, https://doi.org/10.1109/tgcn.2021.3095070
-
X. Liu, Z. Liu, B. Lai, B. Peng, and T. S. Durrani, “Fair energy-efficient resource optimization for multi-UAV enabled internet of things,” IEEE Transactions on Vehicular Technology, Vol. 72, No. 3, pp. 3962–3972, Mar. 2023, https://doi.org/10.1109/tvt.2022.3219613
-
B. Liu, C. Liu, and M. Peng, “Computation offloading and resource allocation in unmanned aerial vehicle networks,” IEEE Transactions on Vehicular Technology, Vol. 72, No. 4, pp. 4981–4995, Apr. 2023, https://doi.org/10.1109/tvt.2022.3222907
-
Z. Yu, Y. Gong, S. Gong, and Y. Guo, “Joint task offloading and resource allocation in UAV-enabled mobile edge computing,” IEEE Internet of Things Journal, Vol. 7, No. 4, pp. 3147–3159, Apr. 2020, https://doi.org/10.1109/jiot.2020.2965898
-
X. Sun, C. Zhang, L. Zou, and S. Li, “Real-time optimal states estimation with inertial and delayed visual measurements for unmanned aerial vehicles,” Sensors, Vol. 23, No. 22, p. 9074, Nov. 2023, https://doi.org/10.3390/s23229074
-
K. Mao et al., “A survey on channel sounding technologies and measurements for UAV-assisted communications,” IEEE Transactions on Instrumentation and Measurement, Vol. 73, pp. 1–24, Jan. 2024, https://doi.org/10.1109/tim.2024.3436128
-
Z. Cui, C. Briso-Rodriguez, K. Guan, Z. Zhong, and F. Quitin, “Multi-frequency air-to-ground channel measurements and analysis for UAV communication systems,” IEEE Access, Vol. 8, pp. 110565–110574, Jan. 2020, https://doi.org/10.1109/access.2020.2999659
-
Q. Song, Y. Zeng, J. Xu, and S. Jin, “A survey of prototype and experiment for UAV communications,” Science China Information Sciences, Vol. 64, No. 4, p. 140301, Feb. 2021, https://doi.org/10.1007/s11432-020-3030-2
-
Y. Yang et al., “Real-time ray-based channel generation and emulation for UAV communications,” Chinese Journal of Aeronautics, Vol. 35, No. 9, pp. 106–116, Sep. 2022, https://doi.org/10.1016/j.cja.2021.12.008
-
C. Zhao, Z. Xu, Q. Liu, and E. Wang, “Vector analysis of unmanned aircraft sea surface imaging characterization based on ISAR,” Journal of Measurements in Engineering, Vol. 13, No. 1, Oct. 2024, https://doi.org/10.21595/jme.2024.24304
-
R. A. Zitar, L. Abualigah, F. Barbaresco, and A. E. Seghrouchni, “Modified arithmetic optimization algorithm for drones measurements and tracks assignment problem,” Neural Computing and Applications, Vol. 35, No. 14, pp. 10421–10447, Feb. 2023, https://doi.org/10.1007/s00521-023-08242-4
-
M. Cheng, C. Zhu, M. Lin, J.-B. Wang, and W.-P. Zhu, “An O-MAPPO scheme for joint computation offloading and resources allocation in UAV assisted MEC systems,” Computer Communications, Vol. 208, pp. 190–199, Aug. 2023, https://doi.org/10.1016/j.comcom.2023.06.008
-
V. Kumari and C. Sudhakar, “Randomized cost analysis for nonclairvoyant task offloading in edge computing,” IEEE Internet of Things Journal, Vol. 11, No. 8, pp. 13571–13583, Apr. 2024, https://doi.org/10.1109/jiot.2023.3339219
-
L. Zhong, S. Yang, K. Song, M. Wang, K. Jiang, and G.-M. Muntean, “MDC2: an integrated communication and computing framework to optimize edge-assisted caching for improved multimedia services in UAV-based IoT networks,” IEEE Internet of Things Journal, Vol. 11, No. 20, pp. 32393–32403, Oct. 2024, https://doi.org/10.1109/jiot.2024.3383821
-
J. M. de Freitas, “Shannon-Hartley channel capacity for underwater wireless optical communications,” ACS Photonics, Vol. 11, No. 3, pp. 866–873, Mar. 2024, https://doi.org/10.1021/acsphotonics.3c00843
-
J. Zheng, H. Wang, and B. Pei, “UAV attitude measurement in the presence of wind disturbance,” Signal, Image and Video Processing, Vol. 14, No. 8, pp. 1517–1524, Apr. 2020, https://doi.org/10.1007/s11760-020-01693-5
-
J. Wu et al., “An adaptive conversion speed Q-learning algorithm for search and rescue UAV path planning in unknown environments,” IEEE Transactions on Vehicular Technology, Vol. 72, No. 12, pp. 15391–15404, Dec. 2023, https://doi.org/10.1109/tvt.2023.3297837
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
Liyuan Yang: concept or design of the literature or participation in the acquisition, analysis or interpretation of data. Yongping Hao: take responsibility for all aspects of the research and ensure that you are responsible for investigating and resolving any issues with the accuracy or completeness of the research.
The authors declare that they have no conflict of interest.
