Abstract
The main focus of paper is to get full understanding of four different types of shock absorbers characteristics and their effects on the vertical evaluation indexes of a bus subjected to harmonic excitation. The quarter car with two degree of freedom (2DOF) model was employed to calculate the vertical evaluation indexes. The bus is assumed to travel at a constant velocity on a road surface with a profile following a sinusoidal function. The four types of the shock absorber are Linear Symmetric (LS), Nonlinear Symmetric (NS), Linear Asymmetric (LA), and Nonlinear Asymmetric (NA). As for the LS type, the damping force is a linear function of the relative velocity, and the damping force is symmetric for the conditions of the positive and negative relative velocities. Same as for the LA type, it means that the damping force is linear, however it is asymmetric and differentiated according to the suspension state of stroke (compression or extension). As for the NS type, the damping force function is symmetric, nonlinear, differentiated according to the magnitude of the relative velocity. As for the last NA type, the damping force function is also nonlinear and differentiated according to the magnitude of the relative velocity, but it is also asymmetric. The obtained evaluation indexes of the relative displacement of the bus suspension, acceleration of the bus body, and the dynamic tire load within the frequency range of 0 and 25 (Hz), the common frequency range of the bus in operations. The results suggest that the NA shock absorber type is more effective in reducing the suspension dynamic deflection stroke, improving the road holding and maintaining the ride comfort. The systematic assessments of the shock absorber characteristics should guide interested readers in selecting the most appropriate damping coefficient.
Highlights
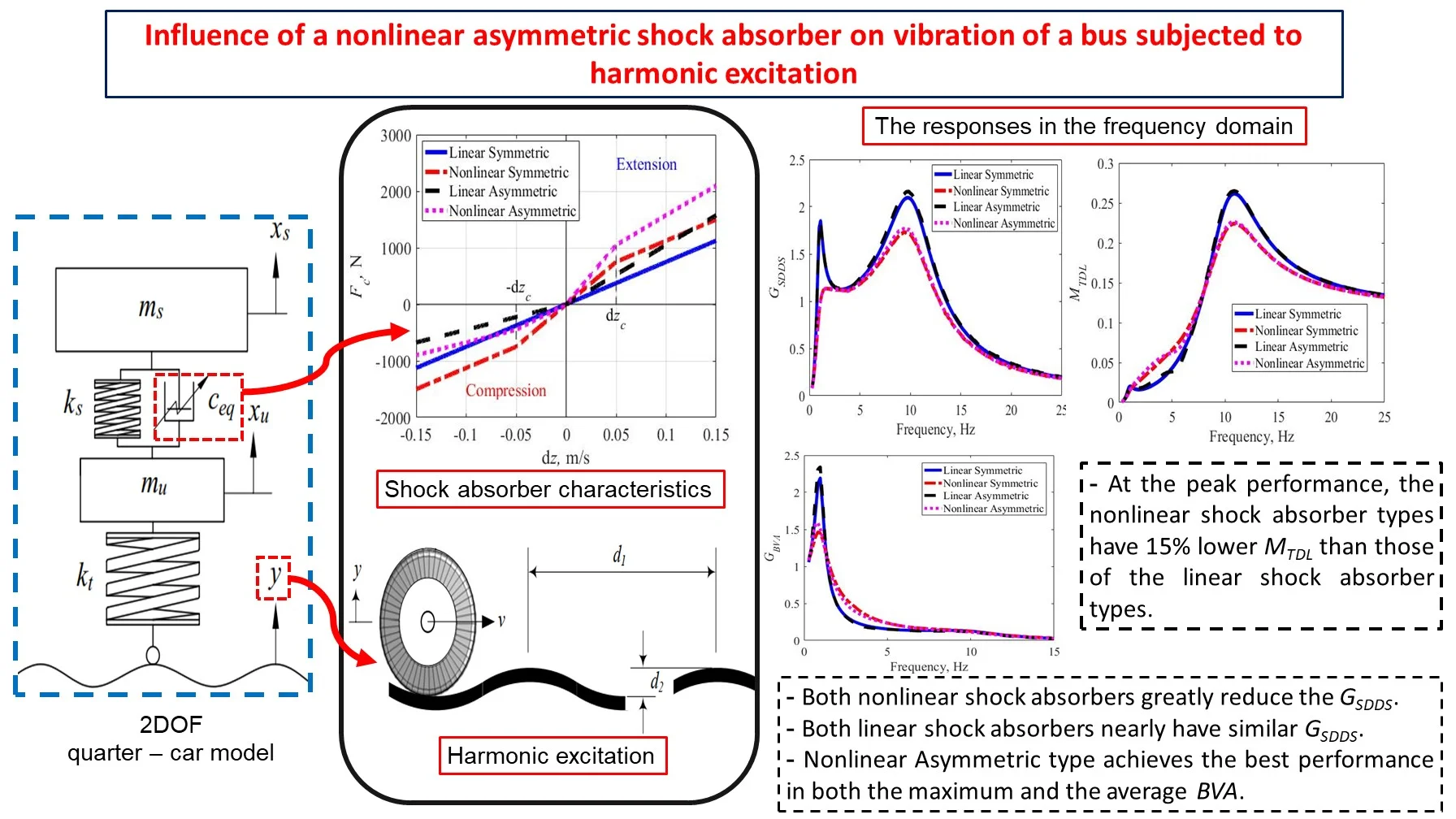
- At the peak performance, the nonlinear shock absorber types have 15% lower MTDL than those of the linear shock absorber types.
- Both nonlinear shock absorbers greatly reduce the GSDDS.
- Both linear shock absorbers nearly have similar GSDDS.
- Nonlinear Asymmetric type achieves the best performance in both the maximum and the average BVA.
1. Introduction
With the increasing requirements, especially for the ride comfort of buses, which are manufactured and assembled in Vietnam. Bus ride comfort was carried out by the multibody dynamic model to help the bus designers and manufacturers in order to improve and harmonize oscillatory comfort on the whole vehicle platform [1]. The oscillatory model with 10DOF was employed to investigate the effects of bus vibrations on the comfort for the space of a driver, passenger in the middle part of the bus and passenger in the rear overhang [2]. The determination of suspension parameters is very important, because it is directly related to ride comfort, safety and road holding during the operation of vehicles. The evaluation indexes of the ride comfort, workability, and operational safety of the bus suspension system were studied under the random excitation, with the change of the stiffness and damping values in the investigated domain [3, 4]. It shows that shock absorbers represent a critical element of a suspension, in order to better understand the influence of damping parameters on ride comfort of vehicles, many studies have been carried out [5, 6]. The multibody model of a larger bus was employed, in which a dynamic model for the MR (magnetic-rheological) damper was developed, a comparison to the traditional passive damper model showed the improvement [5]. The 2DOF quarter car model with LA shock absorber, in which the damping ratio value changing with the stroke was used to analyze the vertical dynamics of an electric vehicle. The road profile was in type of triangular shape according to GB/T 4970-2009 standard, the vehicle moves over the bump with different speeds [6]. The influence of LA shock absorber on the vehicle's ride comfort, was studied with the single bump effect, by using the 2DOF quarter car and the 4DOF half car models [7]. The influence of LA shock absorber under the effect of the harmonic excitation was studied to improve the vehicle's ride comfort, by the 2 DOF quarter car model [8]. Recently, an investigation of a bus’s ride comfort with the two types of LS and LA shock absorbers was carried out, in which the quarter car model was employed, subjected under transient and random road excitations [9].
In Vietnam’s practice, the types of shock absorbers have been recently used in the design and manufacture of buses are of symmetric/asymmetric and linear/nonlinear ones. This paper is conducted to get full understanding of the influences of the 4 types of common shock absorbers’ characteristics on the bus vibration. The vibration evaluation indexes for a typical bus have been specifically identified corresponding to each type of shock absorber characteristic, in which the initial damping coefficient c0 is chosen as the same for all 4 types of shock absorbers. The evaluation indexes in terms of ride comfort, suspension working space, and road holding are determined under the excitation of the harmonic function. The obtained results are presented and analyzed systematically to help understand the nature of the influences of 4 common types of shock absorbers characteristics on the typical bus vertical dynamic evaluation indexes in the frequency domain. Especially, the peak values of the obtained gain responses at the corresponding resonance values of the natural frequencies of the suspension system and the tire, respectively. The type of NA shock absorber gives the best results in improving suspension performance, road holding, and maintaining ride comfort for the buses, which are being designed and manufactured in Vietnam.
2. Research method
2.1. Simulation model
This research intends to evaluate four types of shock absorbers in the suspension system and their effects on ride comfort, suspension working space and road holding of the bus. We develop a bus suspension model, compute the responses of acceleration, relative displacement and tire dynamic load (TDL), and establish its characteristics to understand the four types of shock absorbers that affect the bus vertical dynamic evaluation indexes. The bus model is simplified as a system consisting of masses, springs, and a damper as shown in Fig. 1.
Fig. 1The quarter car 2DOF model [10]
![The quarter car 2DOF model [10]](https://static-01.extrica.com/articles/23404/23404-img1.jpg)
The symbols, and the meanings of the quarter car 2DOF model parameters, are given in Table 1.
Table 1The quarter car 2DOF model parameters
Symbol | Description | Value |
ms | Sprung mass [kg] | 2000 |
mu | Un-sprung mass [kg] | 250 |
ks | Suspension spring stiffness [N/m] | 8×104 |
c0 | Initial damping coefficient [Ns/m] | 7500 |
kt | Tire stiffness [N/m] | 1×106 |
xs | Vertical displacement of the sprung mass [m] | – |
xu | Vertical displacement of the un-sprung mass [m] | – |
Y | Road excitation [m] | – |
In the Fig. 1, the bus body is denoted by the sprung mass ms, and the suspension system connects the un-sprung mass mu. The displacements of the sprung and un-sprung masses are denoted by xs and xu, respectively. The suspension consists of a spring ks and an equivalent damping coefficient ceq, provides support to the bus body. The bus is assumed to travel at a constant speed v on a road surface with a road profile y. The stiffness between the un-sprung mass and the road is the tire stiffness denoted by kt. The sprung mass is 2000 (kg), and the un-sprung mass is 250 (kg). The spring stiffness ks is 8.104 (N/m), corresponding to the natural frequency of the bus suspension system of about 1 (Hz) [1]. The tire stiffness kt is 1.106 (N/m).
The set of differential equations describing the 2DOF vertical dynamic model, is written in matrix form as shown in Eq. (1) as, [10]:
where, the matrices included in the general dynamic equation are presented as:
[m]=[mu00ms],[k]=[ks+kt-ks-ksks],[c]=[ceq-ceq-ceqceq],[F]=[kty0].
The variables ˙x and ¨x denote the velocity and acceleration. The subscripts t and s represent the tire and suspension, respectively. In addition, we introduce the shock absorber force Fc, which is linearly related to the relative velocity of the suspension system. The force is expressed by:
where dz is the relative velocity of the suspension, defined by:
The equivalent damping coefficient ceq is related to the damping ratio ξ by ceq=2ξ√msks where the damping ratio value is in range of 0.2-0.4, [11]. In the present study, we focus on four different damping characteristics. The initial value of the damping coefficient is c0=7500 (Ns/m), corresponding to ξ=0.3.
2.2. Harmonic excitation
We assume the bus is moving at a constant velocity v on the surface of a road whose profile follows a sinusoidal harmonic function of time t, as in Eq. (4):
The considered road profile is characterized by the road bump length d1, the road bump height d2, and the velocity v, see Fig. 2. The road bump is 1 (m) in length and 0.005 (m) in height. The velocity v is chosen to be in range of 1-100 (km/h) corresponding to the frequency of excitation in the range of 0.28-27.78 (Hz), determined by Eq. (4).
Fig. 2The road profile described by the sinusoidal harmonic function [10]
![The road profile described by the sinusoidal harmonic function [10]](https://static-01.extrica.com/articles/23404/23404-img2.jpg)
2.3. The four types of shock absorbers
Four types of shock absorbers are investigated. The parameters of shock absorber models are given in Table 2.
Table 2Shock absorber model parameters
Symbol | Description | Value |
c0 | Initial damping coefficient [Ns/m] | 7500 |
dzc | Knee-point [m/s] | 0.05 |
κ | Slope of low-speed damping coefficient | 2 |
λ | Slope of high-speed damping coefficient | 1 |
eD | Asymmetric coefficient | 0.4 |
The first case is the Linear Symmetric (LS) shock absorber. In the LS type, the generated damping force is proportional to the relative velocity dz of the suspension system. The damping coefficient is fixed at c0=7500 (N.s/m).
The second case is called Nonlinear Symmetric (NS) shock absorber. This type is characterized by a knee point dzc=0.05 (m/s), which separates the shock absorber response into two domains: low and high speeds. The damping force is governed by κ parameter at the low speed and by λ parameter at high speed. For the NS type, the shock absorber force follows the following formulas:
We choose κ=2 and λ=1, suggesting the damping strength at the low speed is twice as big as at high speed. The damping coefficient in the high-speed region is c0.
The third case is Linear Asymmetric (LA) shock absorber. The shock absorber force follows the formula:
The asymmetric coefficient eD is taken as 0.4 [12], corresponding to the ratio of the compression and extension strokes of 30 to 70. Initially, the equivalent damping coefficient ceq is taken to be equal to the initial one c0, when the relative velocity, dz=0.
Finally, the fourth case is Nonlinear Asymmetric (NA) shock absorber. To some extent, the case is a combination of Case 2 and Case 3. The damping force changes proportionally but asymmetrically with the coefficient eD. The slope of the damping force is altered at the knee-point value dzc with the coefficients κ and λ. Similarly, initially, when dz=0, the equivalent damping coefficient ceq equals to c0. Analytically, the damping force follows the following composite functions:
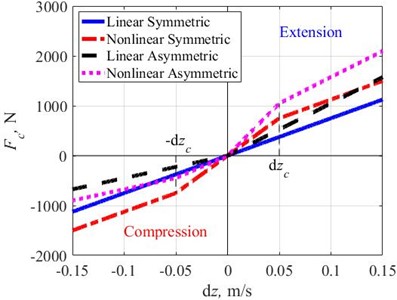
In Fig. 3, a comparison is graphically made for the four types of shock absorbers. The relative velocity dz is plotted against the shock absorber force Fc. For the first case, Linear Symmetric shock absorber, the damping force increases linearly with the velocity. The linear relationship is also present for the third model but with a knee-point at dz=0, resulting in a bilinear curve. The second and fourth models have three knee points at dz=-dzc, dz=0, and dz=dzc, breaking down the velocity range into four domains, namely, dz=<-dzc, -dzc≤dz<0, 0<dz≤dzc, and dz>dzc. In each domain, the damping force is proportional to the relative velocity of the suspension.
Fig. 3The relationship between the damping force Fc and the relative velocity dz for the four types of shock absorbers
2.4. Evaluation indexes
Calculations are performed for each value of applied excitation frequency. The parameters of Suspension Dynamic Deflection (SDD), acceleration of the sprung mass namely Body Vibration Acceleration (BVA), and Tire Dynamic Load (TDL) are determined in the time domain, when in steady-state of the harmonic responses with the same frequency as the applied excitation frequency. The amplitude values of the obtained results in the time domain are determined at steady-state. Then, the evaluation indexes are determined in the frequency domain with the frequency range of 0-25 (Hz), a normal range for the vehicle operations [10]. Especially at the resonance values corresponding to each type of damper, can be characterized most meaningfully and systematically.
2.4.1. Gain response of SDD
The relative displacement of the suspension to evaluate the Suspension Dynamic Deflection (SDD). The gain response of maximum and minimum relative displacement are defined as the corresponding ratio of the maximum and minimum relative displacements to the amplitude of the road excitation, d2, [10], following the Eq. (8), and Eq. (9), respectively:
It is easy to see that the working stroke of the suspension system with asymmetric shock absorber is asymmetric around the initial equilibrium position. To be able to compare the Suspension Dynamic Deflection Stroke (SDDS) parameter of different types of shock absorbers, the gain response of SDDS is determined by Eq. (10):
2.4.2. Gain response of BVA
The gain response of the Body Vibration Acceleration (BVA), GBVA is defined as the ratio of the value of the sprung mass acceleration amplitude variation over time to the applied excitation acceleration amplitude. Mathematically, the GBVA is calculated by Eq. (11):
2.4.3. Tire dynamic load - TDL
The maximum tire dynamic load MTDL is defined as the ratio of the maximum dynamic force applied to the tire to the static reaction load [6]. The MTDL is computed by Eq. (12):
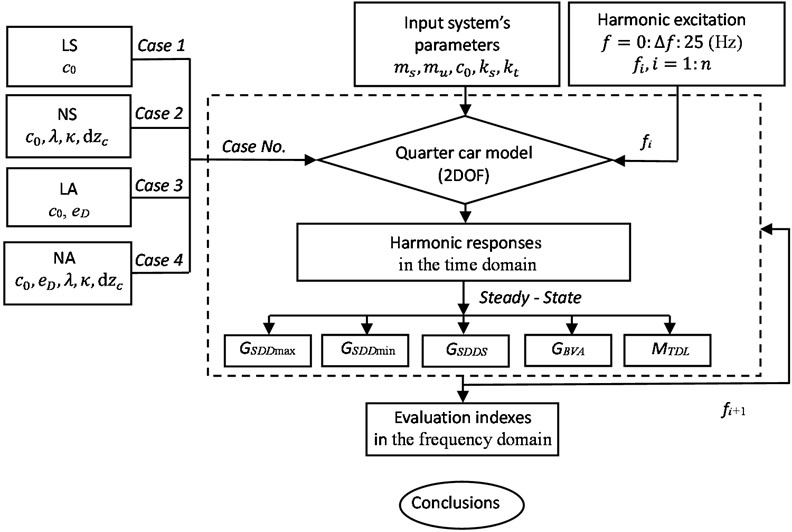
2.4.4. Calculation flowchart
For each type of the shock absorber, calculations are performed for each frequency of the harmonic excitation, the corresponding harmonic responses of SDD, BVA and TDL in the time domain are determined. And then, the corresponding amplitudes of these obtained steady-state harmonic responses are determined. Therefore, for each frequency of applied excitation, the evaluation indexes of SDD, BVA and TDL are determined by the Eqs. (8)-(12). Next, do the same calculation for the next remaining excitation frequency values in the observed domain. The evaluation indexes are identified and analyzed in the observed frequency domain. The calculation flowchart is shown in Fig. 4.
3. Results and discussions
3.1. Gain response of SDD
The gain responses of maximum relative displacement GSDDmax are calculated by Eq. (8) in the frequency domain, for the two cases of LS and NS, Fig. 5. Both of the cases, the obtained GSDDmax are symmetrical to the zero frequency in the domain. The responses have two peaks associated with the two resonances of the system. The first is the suspension’s natural frequency fn1 of about 1 (Hz), and the second is the tire’s natural frequency fn2 of about 10 (Hz). It can be seen that the first peak of the NS shock absorber, which occurs at a low frequency, is lower than that of the LS shock absorber. The phenomenon happens because the NS case has a more significant damping coefficient when |dz|<dzc, corresponding to the low-frequency domain. In addition, the NS shock absorber also has a lower GSDDmax at the second peak. The gains are lower about 33 % at the first peak and 17 % at the second peak. On average, the GSDDmax of the NS shock absorber is lower by about 12 %.
Fig. 4The calculation flowchart
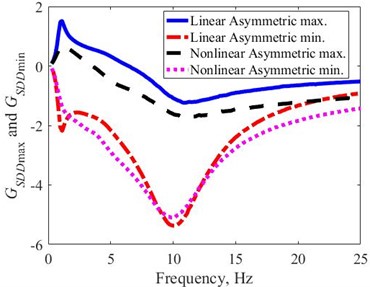
As for the cases of asymmetric shock absorbers, the obtained GSDDmax and GSDDmin are calculated by the Eqs. (8-9), in the frequency domain, Fig. 6. Unlike the previous cases, the gain responses are not symmetric to the zero-frequency axis. In this case, the damping coefficient value depends on the shock absorber states, namely, tension or compression. The value of the damping coefficient is smaller in compression than in tension. The GSDDmax of the NA case is smaller about 133 % on an average than that of the LA case in the entire observed frequency domain. And, the GSDDmax are lower about 56 % at the first peak and 40 % at the second peak. With the obtained GSDDmin, at the 2 peaks of the LA case are lower than the NA case. However, in the frequency domain outside the 2 resonant frequencies, the GSDDmin of the LA case is larger than the NA case. In the entire observed frequency range, the GSDDmin of the NA case is smaller about 15 % on an average than that of the LA case. With both types of asymmetric shock absorbers, the obtained GSDDmax and GSDDmin all have negative values, with the applied excitation greater than 5 (Hz), which indicates that the suspension system is working mostly in the state under compression during the harmonic applied excitation. Due to the asymmetrical characteristic of the shock absorbers, the suspensions move up and down around a position lower than their initial equilibrium position. Therefore, the asymmetry around the zero axis (initial equilibrium position) of the suspension relative displacement corresponds to two types of asymmetric shock absorbers, LA and NA, showing the influence of asymmetric properties of displacement.
Fig. 5The GSDDmax of the LS and NS shock absorbers in the frequency domain
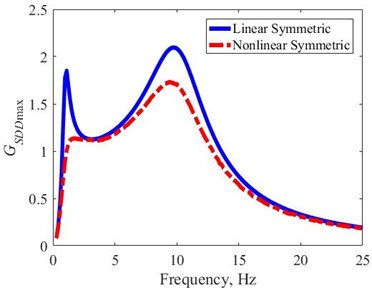
Fig. 6The GSDDmax and GSDDmin of the LA and NA shock absorbers in the frequency domain
3.2. Gain response of SDDS
The obtained results of GSDDS for all four cases of damping characteristics are calculated by Eq. (10) and shown in the frequency domain in Fig. 7. It shows that the obtained GSDDS of the LS type is similar to the LA type. The obtained GSDDS of the NS type is identical to the NA type. Therefore, the GSDDS depends only on the linear or nonlinear properties of the shock absorbers, but completely independent of the asymmetrical properties. At first and second natural frequencies, the peak values of GSDDS with the NS type are smaller, respectively, by 33 % and 17 % compared to the LS type. With the asymmetric types of shock absorbers, the peak values of GSDDS with the NA type are smaller by 31 % and 18 % compared to the LA type, at the first and second natural frequencies, respectively. On average, the GSDDS of the NS and NA shock absorbers are lower about 12 % and 13 % than the LS and LA shock absorbers, respectively.
The obtained GSDDD clearly shows that the working stroke of the suspension system does not depend on the asymmetrical characteristic but only on the nonlinear characteristic of the shock absorbers. In addition, the asymmetrical characteristic of the shock absorbers only affects the equilibrium position of the suspension working stroke.
Fig. 7The GSDDS of the four shock absorbers in the frequency domain
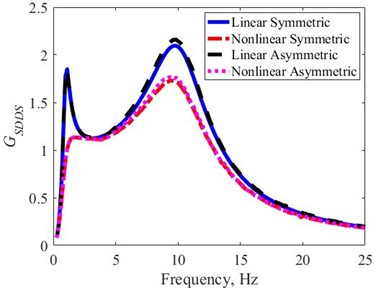
Fig. 8The GBVA of the four types of the shock absorbers in the frequency domain
3.3. Gain response of BVA
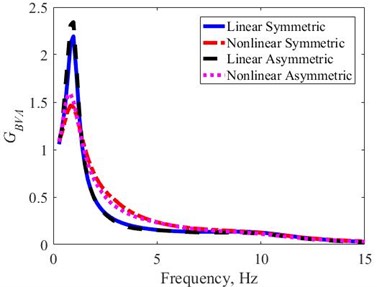
The obtained GBVA are calculated by Eq. (11), in the frequency domain for the four types of shock absorbers, in Fig. 8. The GBVA for the four types of the shock absorbers peak at the first natural frequency fn1. From the peak, the GBVA drop quickly with the frequency. At the first natural frequency, where the peaks of the GBVA occur, the maximum of GBVA are usually in the range of 1.0-2.5, and is the range of interest in the design of the automotive suspension systems [11]. Within the range, the figure shows that the NS and NA shock absorber types have significantly lower peaks than those of LS and LA shock absorber types. However, GBVA of the NS and NA shock absorber types are higher in the frequency range of 3-7 (Hz). Similar to the GSDDS, the GBVA depends only on the linear or nonlinear properties of the shock absorbers, but not almost on the asymmetrical properties.
In Table 3, the characteristics of the GBVA of the four types of shock absorbers are presented. The table shows the maximum and the mean of the GBVA. The relative deviation in the case of LS shock absorber type is also explained. Compared to the LS case, the NS case has a 33 % lower the maximum of GBVA. The NA case has a 27 % the maximum of GBVA lower. However, the mean of GBVA is higher for the NS case (13 %) and the NA case (7 %), respectively. The nonlinear shock absorbers significantly reduce the peak of the GBVA. Therefore, the combination of the nonlinear and asymmetric characteristics, as in the NA case, simultaneously reduces the peak of the GBVA at the low frequency. And the mean of the GBVA in the type of NA shock absorber is not also much increased in the observed frequency range.
Table 3The maximum and mean values of GBVA for the four types of the shock absorbers
Type | Max. GBVA | Mean GBVA | Relative deviation (%) | |
Max. GBVA | Mean GBVA | |||
Linear symmetric | 2.19 | 0.15 | 0 | 0 |
Nonlinear symmetric | 1.47 | 0.17 | –33 | +13 |
Linear asymmetric | 2.34 | 0.15 | +7 | 0 |
Nonlinear asymmetric | 1.59 | 0.16 | –27 | +7 |
3.4. Tire dynamic load – TDL
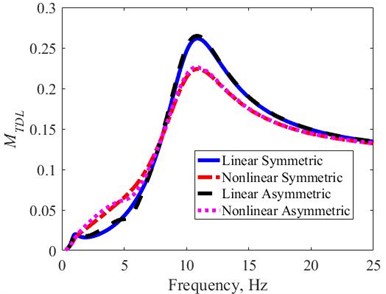
The obtained MTDL are calculated by Eq. (12) for the four types of shock absorbers in the frequency domain, Fig. 9. The MTDL reaches its peak at the second resonant frequency or the natural frequency of the tire. It is easy to see that the MTDL is similar for symmetric and asymmetric shock absorbers, but it is different for linear and nonlinear shock absorbers. In the other words, the MTDL depends only on the nonlinearity and not on the asymmetry of the shock absorbers. In the frequency range of 7-15 (Hz), the MTDL of linear shock absorbers are higher than those of nonlinear shock absorbers. Therefore, the nonlinear shock absorbers increase road holding because the MTDL has a lower value in this range of frequency domain. However, in the lower frequency range, the MTDL are vice versa. The peaks of the MTDL of the nonlinear shock absorbers are lower, about 15 %, than those of the linear shock absorbers. On average, the MTDL of the NS and NA shock absorbers are slightly smaller about 3 % than the LS and LA shock absorbers.
Fig. 9The MTDL of the four types of the shock absorbers in the frequency domain
4. Conclusions
In this research paper, we study the effects of the characteristics of four types of shock absorbers on the vertical dynamic behaviors of a bus. The dynamic quarter car 2DOF model is employed, subjected to harmonic excitation. The characteristics of four types of the shock absorbers, namely, Linear Symmetric, Nonlinear Symmetric, Linear Asymmetric, and Nonlinear Asymmetric are investigated. In particular, we investigate the effects shock absorber types on the evaluation indexes of the relative displacement, acceleration, and tire dynamic force. The ratio of output and input amplitudes namely the ’Gain response or Transmissibility’ represents the input-output relationships of evaluation indexes are studied and presented in the frequency domain, in the normal common range for the vehicle operations (0-20 (Hz)). The vertical dynamic behaviors, especially at the resonance region, of the bus could be characterized most meaningfully. The influences of shock absorber characteristics on the bus vibration are systematically full understanding, and the following conclusions are obtained:
1) The gain responses of the Suspension Dynamic Deflection Stroke (GSDDS) only depend on the linear or nonlinear properties of the shock absorbers, but completely independent of the asymmetrical properties. The average values of GSDDS of the NS and NA shock absorbers are lower about 10 % than the LS and LA shock absorbers.
2) The gain responses of the Body Vibration Acceleration (GBVA) are significantly reduced at the peaks with the types of nonlinear shock absorbers, namely NS and NA. The obtained GBVA also only depend on the linear or nonlinear properties and almost independent on the asymmetrical properties of the shock absorbers. In addition, the peak of the GBVA significantly decreases at the low frequency with the combination of the nonlinear and asymmetric characteristics of the shock absorber, namely NA, and the mean value of the GBVA is not also much increased in the entire vehicles’ common frequency range.
3) The maximum tire dynamic loads (MTDL) depend only on the nonlinearity and not on the asymmetry of the shock absorbers. At the peak performance, the nonlinear shock absorber types have 15 % lower MTDL than those of the linear shock absorber types.
References
-
D. Sekulić, V. Dedović, S. Rusov, A. Obradović, and S. Šalinić, “Definition and determination of the bus oscillatory comfort zones,” International Journal of Industrial Ergonomics, Vol. 53, pp. 328–339, May 2016, https://doi.org/10.1016/j.ergon.2016.04.003
-
D. Sekulić, V. Dedović, S. Rusov, S. Šalinić, and A. Obradović, “Analysis of vibration effects on the comfort of intercity bus users by oscillatory model with ten degrees of freedom,” Applied Mathematical Modelling, Vol. 37, No. 18-19, pp. 8629–8644, Oct. 2013, https://doi.org/10.1016/j.apm.2013.03.060
-
L. X. Long, L. Quynh, and B. Cuong, “Study on the influence of bus suspension parameters on ride comfort,” Vibroengineering PROCEDIA, Vol. 21, pp. 77–82, Dec. 2018, https://doi.org/10.21595/vp.2018.20271
-
D. Sekulic and V. Dedović, “The effect of stiffness and damping of the suspension system elements on the optimisation of the vibrational behaviour of a bus,” International Journal for Traffic and Transport Engineering, Vol. 1, No. 4, pp. 231–244, 2011.
-
Y. Kim, S. Choi, J. Lee, W. Yoo, and J. Sohn, “Damper modeling for dynamic simulation of a large bus with MR damper,” International Journal of Automotive Technology, Vol. 12, No. 4, pp. 521–527, Aug. 2011, https://doi.org/10.1007/s12239-011-0061-5
-
L. Zhao, Y. Yu, C. Zhou, S. Mao, and F. Yang, “Simulation of vertical characteristics and in-wheel motor vibration of electric vehicles with asymmetric suspension damper under road impact,” International Journal of Modelling and Simulation, 2018.
-
M. Silveira, B. R. Pontes, and J. M. Balthazar, “Use of nonlinear asymmetrical shock absorber to improve comfort on passenger vehicles,” Journal of Sound and Vibration, Vol. 333, No. 7, pp. 2114–2129, Mar. 2014, https://doi.org/10.1016/j.jsv.2013.12.001
-
M. Silveira, P. Wahi, and J. C. M. Fernandes, “Effects of asymmetrical damping on a 2 DOF quarter-car model under harmonic excitation,” Communications in Nonlinear Science and Numerical Simulation, Vol. 43, pp. 14–24, Feb. 2017, https://doi.org/10.1016/j.cnsns.2016.06.029
-
D. D. Le and H. N. Tran, “An investigation of a bus’s ride comfort by using the quarter car model with linear asymmetric damper,” Journal of Vibroengineering, Vol. 25, No. 1, pp. 143–155, Feb. 2023, https://doi.org/10.21595/jve.2022.22811
-
R. N. Jazar, Vehicle Dynamics Theory and Application. New York, USA: Springer, 2008.
-
T. D. Gillespie, Fundamentals of Vehicle Dynamics Software. Warrendale, USA: SEA, 1992.
-
J. C. Dixon, The Shock Absorber Handbook. USA: John Wiley and Sons, Ltd., 2007.
About this article

We acknowledge Ho Chi Minh City University of Technology (HCMUT), VNU-HCM for supporting this study.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
Huu Nhan Tran: conceptualization, methodology, software, supervision, validation. Fergyanto E. Gunawan: visualization, writing – review and editing. Ngoc Dai Pham: data curation, formal analysis, resources, writing – original draft preparation
The authors declare that they have no conflict of interest.
