Abstract
An Industrial Robot is used in industries for transporting, assembly, manufacturing and many more applications. Industrial robots include manufacturing robots, material handling robots, robotic arm and manipulator, mobile robots, assembly robots, etc. In this paper, Mobile Robots are further being discussed. One of the tools that a Mobile Robot uses to function is all with the help of Artificial Intelligence (AI) for performing several tasks autonomously. AI works as the intelligence of the human body for robots. AI is the technology that made it possible for robots to be capable of being totally autonomous. AI marks its presence in the Manufacturing Industry with the 4th Industrial Revolution. AI has several algorithms that help in collecting and analyzing data in order to help robots to function in specific ways. These techniques include Fuzzy Logic, Genetic Algorithm, Neural Network, etc. In this paper, the role of these algorithms in Mobile Robots is discussed. Based on the review of 74 papers and articles, it is observed that there are no review papers discussing the role of nature-based and conventional algorithms used for navigation in Mobile Robots. The use of different AI techniques for specific applications has been discussed in tabular form in this paper.
1. Introduction
Mobile Robots are increasingly being used in the industry for various applications since the past few decades. The use of Mobile Robots, however, is not limited just to industrial purposes but also has applications in domains like education, medicine, space, rescue, agriculture and much more. When the robots are given tasks to perform in any of the above-mentioned domains, the robot does so, performing its primary task of navigation to reach its location goal. While performing navigation, the robot comes across obstacles which have to be avoided in order for smooth execution of the task. The navigation of robots is done by virtue of several navigational techniques. The crucial function of navigational techniques is the safe path planning, i.e., detection and avoidance of obstacles, when moving from the home position towards the goal.
The concept of Mobile robots and their navigation has been studied by Rubio et al. [1]. Stationary arm or manipulator along with land-based, air-based, and water-based robots can be included under the bracket of mobile robots. The domain of mobile robotics includes maneuvering, perception, cognition and navigation. V. Kunchev et al. [2] defined the steps involved in the navigation of a mobile robot. They have taken into account dynamic and static obstacles when planning the path for navigation. They have presented their work with an example of a generic UAV. Cebollada et al. [3] have communicated the works carried out under the domains of localization, navigation, mapping and SLAM. They have showcased the integration of vision sensors with AI as a method to solve the problems in mobile robotics. Many researchers have worked on different types of mobile robots. Instances of applications of mobile robots have been discussed below.
Irshat et al. [4] have developed a system of selecting the best possible AI technique for any mobile robot. The system is capable of choosing the AI technique by considering the sub-systems and functions of the mobile robot. They have applied this system to a mobile robot that works as a sprinkler system named “Fregat”. An experimental analysis of stability for two wheeled mobile robots has been conducted by Abhijeet et al. [5]. They concluded on using the Takagi Sugeno method for controlling the robot. A comparison has also been carried out between the simulation and experimental results.
Cirillo et al. [6] discussed environment sharing of mobile robots with humans in environments like industries and homes. They have demonstrated their work by taking into account the presence of humans in the kitchen. Crnokic et al. [7] have presented a way of using mobile robots as a tool for education. “Robotino” is the robot used for simulation as well as real world application to learn various concepts in robotic systems.
F. R. Noreils [8] has described the use of robot architecture for integration of mobile robots in indoor territory. Demonstration of convoying and box pushing is showcased using two mobile robots. M. Bengel et al. [9] have tested the capabilities of mobile robots for inspection in environments with oil and gas. They have demonstrated the working of the mobile robot remotely, as it can be dangerous for human intervention in such environments. They concluded the work by experimentally verifying their robot to work in offshore environments seamlessly and completing the tasks with static as well as dynamic obstacles to tackle. H. Unger et al. [10] have researched deploying collaborative mobile robots in factory environments. Their system is safe for the robot to work with coworkers. They introduced a novel approach of mounting static robots on mobile platforms for transporting them inside a factory.
In this paper, the contribution of nature-based and conventional techniques used for path planning of mobile robots is highlighted. The presented paper also showcases the work done using each AI technique based on year, work environment, types of obstacle avoidance, type of work and application area. The paper discusses about the benefits of using hybridized techniques instead of the use of individual techniques for better applications and nullification of drawbacks of different algorithms. The following review is structured as follows: After discussing path planning and the use of AI for path planning, the various AI techniques with their applications will be discussed in the next section, followed with discussion on the findings of this review.
2. AI techniques used in mobile robots for path planning
Path planning in robots is in itself an area of research when working with robots. The navigation of a robot plays an important role in transportation of goods or the robot itself from its home to the goal location. Path planning of any robot includes obstacle avoidance, shorter path recognition, goal approach, map formation. The shorter the path planned by any algorithm, the better performance is considered for the specific algorithm in comparison to others. A shorter path directly corresponds to less time taken to reaching the goal and also lower consumption of power in navigation. The basic flow of navigation is laid out in Fig. 1.
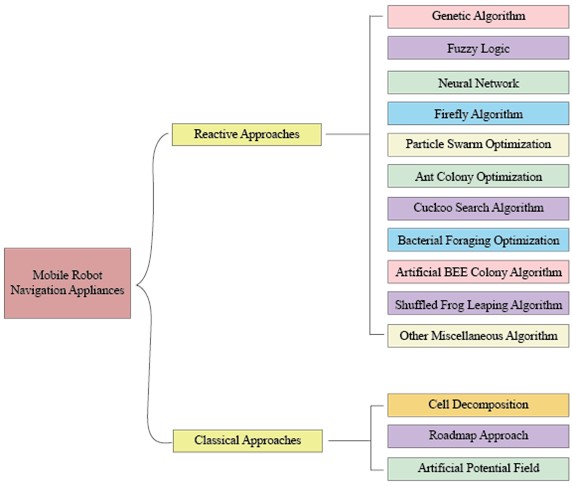
AI techniques are used in path planning for optimization of the algorithms for reducing the path lengths. In this paper some of the navigational techniques based on AI are discussed viz. Fuzzy Logic (FL) and Dynamic Window Approach (DWA). Nature-based algorithms include Artificial Neural Network (ANN), Genetic Algorithm (GA), Ant Colony Optimization (ACO), Particle Swarm Optimization (PSO) [11]-[13]. The algorithms help the robot to tackle static and dynamic obstacles and also have capabilities of working in indoor and outdoor environments. A brief classification of AI techniques is displayed in Fig. 2.
Fig. 1Flowchart of steps in path planning of robots
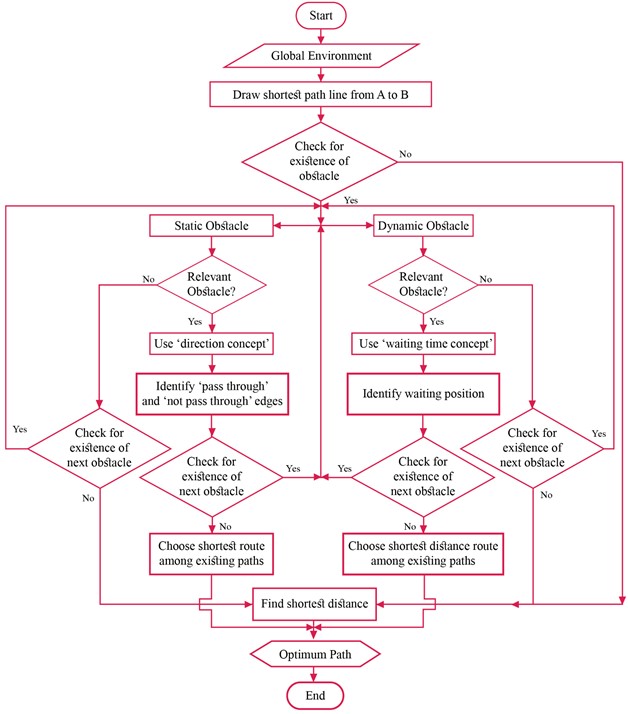
Fig. 2Classification of navigational techniques
2.1. General purpose function approximation model
2.1.1. Fuzzy logic (FL)
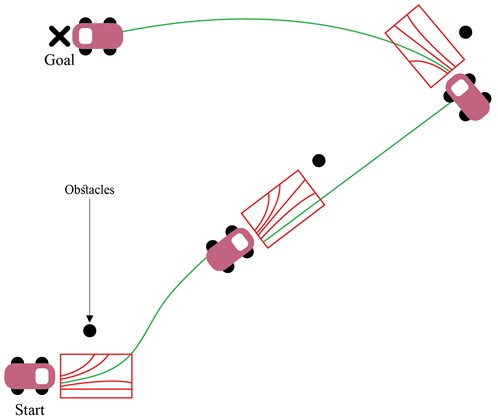
L. A. Zadeh [14] introduced the concept of FL in 1965. FL has the capability to add more value when compared to traditional decision-making systems. The traditional approach works on binary output, whereas FL can give an output that ranges between 0 and 1. This makes the FL decision-making technique superior to the traditional approach. In terms of path planning, instead of stopping when an obstacle is detected, FL optimizes the speed of the robot and changes its trajectory according to the obstacle in order to reach the goal faster.
Shitsukane et al. [15] have demonstrated their work as a simulation on MATLAB and V-REP. They worked on Mamdami fuzzy logic type-1 in a static environment. They examined the extent with which they could reduce fuzzy rules that are applied to a robot. A. Pandey et al. [16] simulated their work on MATLAB using fuzzy logic. They conducted their research with different shapes and sizes of obstacles. They concluded their work by showcasing no collisions in the simulation.
Fig. 3Example for Fuzzy Logic for obstacle avoidance
Antonelli et al. [17] proposed a system with direction for next time interval as input and cruise velocity for safe drive as the output. They demonstrated the use of a fuzzy logic-based system for a camera-based lane detection robot. They carried out two experiments, one for lane detection testing and the second for tracking motion and velocity of the robot in real time, to validate their system. P. Reignier [18] demonstrated their model and highlighted the problem when using fuzzy logic. The experimentation with repeated iterations shows that the problem of local minima and oscillations still persists.
Saffiotti et al. [19] discuss the difficulties faced in path planning when using fuzzy logic. They demonstrated their work on Flakey, which is a mobile robot developed by SRI International. They showcase the benefits of the use of weighted combination over behavior-based combination in fuzzy logic control. Omrane et al. [20] demonstrates a trajectory tracking controller which is based on fuzzy logic for indoor path planning. They used MATLAB and SIMIAM for simulation and navigation respectively.
Li et al. [21] simulated a two wheeled mobile robot in an unknown environment. They showcased a significant decrease in the fuzzy logic rules applied to the robot due to their proposed system. Due to this decrease, they made the system faster compared to other systems. Faisal et al. [22] demonstrated the application of mobile robots in a warehouse setup, this setup contains a variety of static as well as dynamic obstacles for the robot to tackle. The proposed system developed by them generated smooth paths using fuzzy logic and the system was demonstrated using Scout-II robot.
Singh et al. [23] demonstrated a wheeled mobile robot using fuzzy logic in a static environment. The system was simulated using MATLAB with a varying number of obstacles for each iteration. Verification of the simulated system was carried out by a DANI robot with setups similar to the simulations. The proposed system was able to cut down the travel time, thus reducing the power consumption by robots to reach the goal. Yen et al. [24] proposed a system to reduce the information loss that occurs due to command fusion in mobile robots. The proposed system is based on Payton and Rosenblatt’s architecture. The system was tested by simulations where obstacles were set on the path and also close to the path, but the system was able to navigate through smoothly without collision.
Table 1Analysis of papers on fuzzy logic
References | Year | Type of work | Hybrid methods implemented | Type of obstacle avoidance | ||
Simulation work | Experimental work | Static | Dynamic | |||
Fuzzy Logic | ||||||
15 | 2022 | + | + | |||
16 | 2014 | + | + | |||
17 | 2007 | + | + | |||
18 | 1994 | + | + | |||
19 | 1999 | + | + | |||
20 | 2016 | + | + | |||
21 | 2013 | + | + | |||
22 | 2013 | + | + | |||
23 | 2018 | + | + | |||
24 | 1995 | + | + | |||
2.1.2. Neural network (NN)
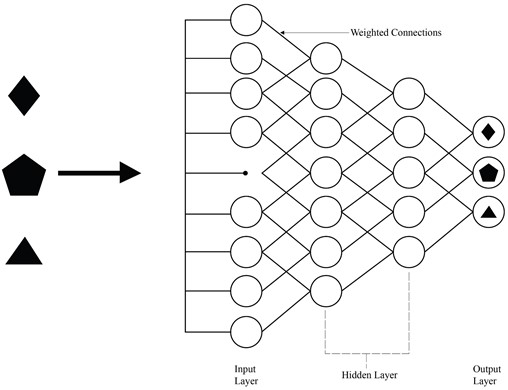
NN is an algorithm that takes its inspiration from the human brain [25]. NN consists of three layers: input, hidden and output layer, which represent neurons. In each layer there are pre-trained nodes with the help of data sets. The nodes in each layer are connected to each other and every connection line has weights, this helps in dynamic decision-making for the system. Neural Network can be further classified into three categories: Imitation algorithm, Reinforcement algorithm and Deep-Learning algorithm.
Fig. 5Neural network layers
2.1.2.1. Imitation algorithm
Imitation Learning is a type of algorithm, as the name suggests, uses imitation, i.e., mimicking the behaviour of a specific task from the use-cases provided as samples for learning. In the case of path planning, this algorithm can prove to be best suited by providing use-cases for dos and don'ts during the task of path planning. E. Rehder et al. [26] used the Imitation Learning technique for path planning with the help of use-cases that consists of human demonstration of path planning. The authors train their network for planning of path in complex traffic situations. The use-cases were sampled from both simulated and real world data.
2.1.2.2. Reinforcement algorithm
Reinforcement Learning is one of the kinds of Neural Network algorithms which learns with the help of information from the previous iteration or the information from the master robot in a fleet. This algorithm can also be considered as a classification of Machine Learning. S. Raju et al. [27] discuss their implementation of reinforcement learning algorithm of an indoor delivery system for path planning and collision avoidance. They propose their system to be cost-efficient and novel to decode the possible direction for movement in the working environment. They have also presented proof of their work by assembling and deploying a robot in an indoor environment, representing a delivery system.
2.1.2.3. Deep-learning algorithm
Deep Learning algorithms are also a type of Machine Learning algorithm that has the capability of handling large amounts of data for carrying out complex decisions. It uses layers which learn about the data as it passes through numerous layers by comparing it with previous data. One of the major drawbacks of deep learning algorithm is that it lacks to generalize simple data. L Zhang et al. [28] discuss their proposed algorithm based on deep learning algorithm with the help of a simulation model. Their proposed algorithm is capable of tackling static as well as dynamic obstacles. A comparison of their proposed algorithm is done along with PSO and GE for static environment and with APF for dynamic environment.
Abiodun et al. [29] discuss the wide areas where the Neural Network algorithm can be implemented. They stated the NN algorithm is best suited to use when using vision systems. The mobile robots using vision systems as sensors can be equipped with NN algorithm for path planning. Velagic et al. [30] demonstrate a NN based system for control of a mobile robot. There are two inputs: speed and position of the wheels of the mobile robot, which act as feedback which is fed into the NN algorithm. This feedback also serves as the input for the learning algorithm for improving the system performance. The kinematic model of the robot is used for testing the performance of the system.
Chi K.H. et al. [31] demonstrate the system based on NN for two bots: Amigo and P3DX. The experimental setup is a maze simulation developed on MATLAB using the Aria library for control of robots. Both the robots are equipped with SONAR and laser range finders as sensors for obstacle detection. They conclude by stating that with increased training of the NN system, the better the system’s performance. Zou et al. [32] surveyed the extent of applications of navigation by using NN in mobile robots. They discussed the ways NN can be used for interpretation of data generated by the sensors. They deliberate about the use of NN in executing tasks like obstacle avoidance and path planning. They also throw light on how NN algorithm can be clubbed with other algorithms for increased performance of the system.
Engedy et al. [33] demonstrates an Artificial NN based navigation system in the mobile robot. They showcase their novel system that uses backpropagation algorithm for increased performance of the NN navigation system. The system runs a feedback loop that keeps sending the data from the previous iterations as learning input for the NN system. This helps the system to keep learning and function with better accuracy. Jung et al. [34] demonstrate a system based on NN with target-tracking technology. The method discussed has the ability to track walls and keep following the walls in order to reach the goal. The robot avoids obstacles while following the target. Whenever it senses a free space, it rotates by 20 degree/sec so that it does not get trapped in local minima.
Nagata et al. [35] showcase their hierarchical NN model for controlling the movements of the mobile robot. They discuss the training pattern used while teaching the system. They studied two behavioural patterns of robots: capture and escape. With about 500 teaching iterations, the robots were able to replicate the two behavioural patterns. Janglova D. [36] developed a navigation system based on a dual NN algorithm. The experiment was carried out in a partially structured space. Both the neural networks have distinct roles to perform, one is used for path finding and the other helps in obstacle avoidance. The obstacle may be static or dynamic and have a random shape. The proposed model was tested and was considered safe to be used in any indoor environment.
Noguchi and Terao [37] proposed a system that combines NN and genetic algorithm for controlling an agriculture robot. It is important for an agricultural robot to work in a particular manner, so it is not feasible for an agricultural robot to keep finding its path towards the goal, in order to save energy. In this system, the path is generated with the help of NN which is then further optimized by a genetic algorithm to save energy consumed by the robot. The experimental results showed significant progress in the generated optimized path.
Table 2Analysis of papers on neural network
References | Year | Type of work | Hybrid methods implemented | Type of obstacle avoidance | ||
Simulation work | Experimental work | Static | Dynamic | |||
Neural network | ||||||
40 | 2008 | + | + | |||
41 | 2011 | + | + | |||
42 | 2006 | + | + | + | ||
43 | 2009 | + | + | |||
44 | 1999 | + | + | |||
45 | 1990 | + | + | |||
46 | 2004 | + | + | + | ||
47 | 1997 | + | + | |||
2.2. Optimizer-in-the-loop methods
2.2.1. Dynamic window approach (DWA)
DWA is a velocity space approach to path planning. In DWA the robot forms a window in the surrounding area that is being detected with the help of mounted sensors on the robot. The limit to this window is the distance that can be covered by the robot in the next time interval. Inside this window, all the possible trajectories are formed that the robot can use to reach the goal. So, whenever an obstacle is detected, trajectories with obstacles are discarded and the trajectory with the least distance to the goal is then selected.
Seder et al. [38] presents a system based on the DWA algorithm for obstacle avoidance and path planning. The system is capable of working with static as well as dynamic obstacles. Simulations were carried out to verify the system using a Pioneer 3DX robot with laser range finder. Brock et al. [39] presents a high velocity system for path planning using DWA. The paper displays the ability of DWA to plan circular or curved paths. The DWA can be carried out by two approaches: holonomic and non-holonomic. The holonomic approach was demonstrated in this paper using the Nomad XR4000 robot. The experiments verified the high velocity dynamic obstacle avoidance of the system.
Fox et al. [40] demonstrate the use of the DWA algorithm for indoor environments. The robot is capable of stopping in case the dynamic obstacle appears at a greater speed to avoid collision. The approach was tested on their mobile robot ‘RHINO’ which was capable of safely moving at a speed of 95 cm/s while avoiding dynamic obstacles in a populated environment. Tang et al. [41] developed a safety system based on improved DWA. They demonstrate how dynamic robot obstacles are different when compared with human obstacles. The system was developed for pedestrian safety when the robot is deployed in public places. The system was simulated using ROS (Robot Operating System) with the Gazebo environment.
Xie et al. [42] applies the DWA algorithm on a four wheeled Mecanum robot. They carried out system testing to reduce the energy consumption of the robot. The energy consumption of the robot was reduced due to the generation of a shorter path using DWA. Li et al. [43] applied the concept of DWA for a soccer robot. The task allotted to the robot was to take the soccer ball to the pre-described goal while avoiding obstacles in the field. The robot was equipped with vision sensors for obstacle detection.
Zhang et al. [44] developed a unique system based on DWA for obstacle avoidance and a QR code-based system for localization and navigation. The QR codes are placed on the ceiling and a vision camera is mounted on the two - wheeled robot. Each code contains the location information stored in it. A laser range finder is installed in the robot to 2-D map the unknown environment for obstacle avoidance. Yang et al. [45] propose a system that combines DWA with A* algorithm for improving the efficiency of path planning. The proposed system constructs a smooth path for the robot to follow. The search efficiency of the robot is improved when the robot is deployed in complex environments.
Fig. 4Example of dynamic window approach to reach its goal
Li et al. [46] develop an improved A* algorithm to increase its efficiency. The proposed algorithm is a combination of DWA and the A* algorithm. With this combination, the accuracy of the algorithm increases by three times. The system is capable of maneuvering in complex environments with dynamic obstacles. Hua Zhang et al. [47] discuss the drawbacks of the traditional DWA approach. They propose their self-adaptive system that has the ability to alter the objective function by the input of two parameters: velocity space and the distance between the goal and the robot. The proposed system is tested with the help of simulation and the problem of avoiding dense obstacles is resolved.
Sgorbissa et al. [48] develop a system for the application of transportation and assistance. They have developed an algorithm, Roaming Trails, that is a hybrid algorithm which is based on DWA. The proposed algorithm is capable of solving the problem of deadlock in path planning. They also experimented with the algorithm in the real-world with their robot, Staffetta. Yuan et al. [49] developed a hybrid system based on the Bat algorithm. The proposed system uses DWA for optimization of the bat algorithm. Upon testing, the results show that the hybrid system not only resolves the demerits of the bat algorithm, but also is better than the traditional DWA. Moon et al. [50] developed a system for collision avoidance in UAVs using DWA. The system uses hybrid DWA which combines the holonomic and non-holonomic approach. The improved algorithm benefits over the traditional DWA by extending the search from 2-D to 3-D.
Table 3Analysis of papers on dynamic window approach
References | Year | Type of work | Hybrid methods implemented | Type of obstacle avoidance | ||
Simulation work | Experimental work | Static | Dynamic | |||
Dynamic window approach | ||||||
25 | 2007 | + | + | |||
26 | 1999 | + | + | |||
27 | 1997 | + | + | |||
28 | 2020 | + | + | |||
29 | 2018 | + | + | |||
30 | 2019 | + | + | |||
31 | 2015 | + | + | |||
32 | 2022 | + | + | + | ||
33 | 2022 | + | + | + | ||
34 | 2021 | + | + | + | ||
35 | 2012 | + | + | + | ||
36 | 2021 | + | + | + | ||
37 | 2018 | + | + | + | ||
2.2.2. Genetic algorithm (GA)
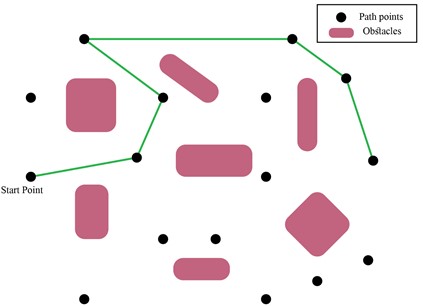
GA was introduced by J. H. Holland [51] in 1960. It is a technique which is inspired by the process of evolution or mutation. A set of possible outcomes for a given problem is first evaluated, out of which the best solution is selected. This process continues such that the next selected outcome is best when compared to the previous outcome. In path planning, we know that the shortest distance to reach a goal is a straight line. GA is used for optimizing the path in order to find the shortest path to reach the goal. When GA is used for path planning, the obstacles are also avoided by taking angular turns and not curves.
Fig. 6Example for genetic algorithm for path planning
Castillo et al. [52] describes a system based on GA to cater to multiple objectives. They discussed the point-to-point movement of an autonomous mobile robot. They simulated the model for both traditional GA and MOGA (multi-objective GA). The simulation proved both the systems to be capable of completing the task of point-to-point movement. Tu J. and Yang S. X. [53] propose their GA based novel approach for mobile robot navigation. The GA used here is set to have a variable chromosome length, this means that there will be an increased number of possibilities of mutation. This will help the system optimization so that a shorter path is created, a shorter path directly points out on faster goal completion. In this paper, the system with fixed length chromosomes in gg HV and variable length chromosomes are also compared.
Tuncer et al. [54] developed a system for path planning of mobile robots in dynamic environments based on GA. GA generally uses a random mutation operator for the generation of an appropriate path for movement of robots. The proposed system eliminates the possibility of the system generating a longer path. The convergence of the paths generated by the proposed system is rapid when compared to the conventional GA. Lambora et al. [55] discuss the concept of GA and explain the flow of GA. Furthermore, the application areas of GA are discussed. GA has a wide range of applications which range from image processing, path planning, search and optimization to recreational activities such as computer games.
Moreno et al. [56] demonstrated indoor experimentation of mobile robot using GA for path planning. The proposed system is equipped with ultrasonic sensors for obstacle detection. The GA generates good results when the population ranges from 100 to 250 chromosomes. Han et al. [57] proposed a GA based path planning system for mobile robots. The system proposes to reduce the time taken for path generation. For faster generation of path, the 2-D data collected by IR sensors are converted to 1-D data for faster processing. The proposed system was validated by simulation as well as real-world experimentation.
Ismail et al. [58] demonstrated their system based on GA, which was set up in maze environments. The population sizes were varied for the experimental evaluation. The environment was distributed with static obstacles in three different configurations: indoor-like, semi-clustered and heavy-clustered. The system performance was effective in all three configurations. Katoch et al. [59] discuss the concept of GA while keeping in perspective the history, current scenario and the future possibilities. The types of hybrid GA algorithms are discussed further in the paper. They also throw light on the wide range of applications like Supply-Chain, Healthcare and Navigation. In this paper, the research direction for future research is also stated. Kumar et al. [60] discuss the methodology used in GA for processing the data for training and learning iterations for the system to function precisely and generate accurate results.
Table 4Analysis of papers on genetic algorithm
References | Year | Type of work | Hybrid methods implemented | Type of obstacle avoidance | ||
Simulation work | Experimental work | Static | Dynamic | |||
Genetic algorithm | ||||||
49 | 2007 | + | + | + | ||
50 | 2003 | + | + | |||
51 | 2012 | + | + | |||
53 | 2002 | + | + | |||
54 | 1997 | + | + | |||
55 | 2008 | + | + | |||
2.2.3. Ant colony optimization (ACO)
Marco Dorigo [61] introduced the concept of ACO in 1992. This technique takes its inspiration from the movement patterns of an ant colony. The concept of ACO comes under swarm intelligence, which means it is used where there are multiple robots working in an environment. Whenever a group of ants travels towards food (goal) they may take different paths, the modes of communication in the case of ants is the pheromones released which are distinct to each ant. After a few iterations of travel from home to goal, the path with a greater number of pheromones is selected, which represents a shorter distance to reach the goal. This concept is visualized for path planning in mobile robot swarms.
Akka and Khaber [62] discuss the concept of ACO for path planning. They propose an improved ACO system, considering the merits and demerits of the traditional system. A grid map environment set up was used for simulating the path planning technique. The simulation results show that the improved ACO developed by the authors is better at fast and short path planning when compared with the traditional approach. Cong et al. [63] demonstrated ACO methodology for path planning using various previously constructed maps. The maps consist of a square grid having static obstacles along with walls, and the home and goal positions are also pre-defined. They test the feasibility of the system with varying complexity of the maps. The test results show that in the initial iterations, the ants tend to hit dead-ends but with increased iterations the ants reach the goal with obstacle avoidance and without hitting dead-ends.
Urjol and Moran [64] conducted testing on their ACO based system for path planning. They used varied shapes and sizes of static obstacles for setting up the grid map. They also changed the resolution of the map for testing. The system was then tested with linear and non-linear changes in the number of obstacles in the setup. With the varying map environment of static obstacles, the proposed system was able to generate a path near to the shortest distance path from home to goal. Gao et al. [65] demonstrate the working of an ACO based system for path planning in a complex environment. They reviewed the existing improved ACO algorithms for finding the gaps in the existing systems. They introduce four strategies for enhancing the performance of the traditional algorithm. The simulation results show the enhanced performance of the EH-ACO algorithm over traditional and existing algorithms due to integration of new strategies by decrease in time taken to reach the goal and distance covered for reaching the goal.
Fig. 7Ant Colony Tracing Path towards its goal
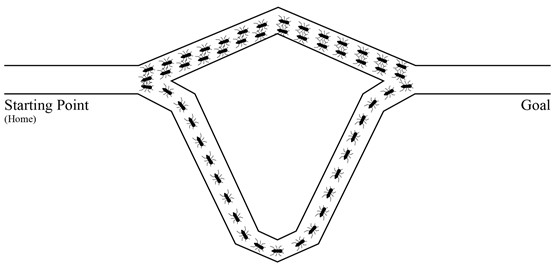
Table 5Analysis of papers on ant colony optimization
References | Year | Type of work | Hybrid methods implemented | Type of obstacle avoidance | ||
Simulation work | Experimental work | Static | Dynamic | |||
Ant colony optimization | ||||||
59 | 2018 | + | + | + | ||
60 | 2009 | + | + | |||
61 | 2017 | + | + | |||
62 | 2020 | + | + | + | ||
63 | 2020 | + | + | |||
64 | 2016 | + | + | |||
Ajeil et al. [66] propose an ACO based algorithm with static and dynamic obstacle avoidance. The proposed algorithm is modified with the ant’s age as input for the system. The algorithm is simulated and tested on MATLAB to obtain the results. They concluded by stating that the proposed algorithm is capable of path finding in a static and dynamic environment. The system was also found to be superior to other path planning techniques. Rashid et al. [67] demonstrated the comparison between the working of the ACO algorithm in simple as well as complex environments. The simulation results found that with the use of the ACO algorithm, there was a significant decrease in the time taken for goal fulfilment in both simple as well as complex work environments.
2.2.4. Particle swarm optimization (PSO)
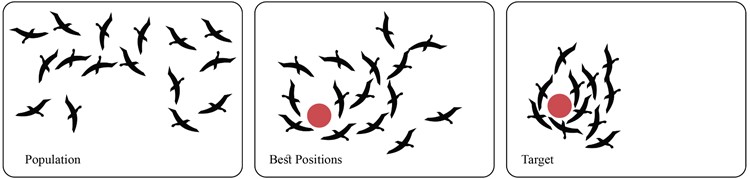
The concept of PSO was introduced in 1995 by Eberhart et al. [68]. This algorithm is inspired by the movement pattern in birds. The swarm of birds has the ability to optimize the path for them to reach the goal. The particle here represents every bird in the flock, each particle tries to get the best possible position, which inspires the neighbouring birds randomly. This can be visualized in terms of mobile robot fleets, such that each robot points in the direction of the goal when assigned. Then each robot will keep moving towards the goal, avoiding obstacles as well as neighbouring robots.
Fig. 8Representation of particle swarm optimization
Dewang et al. [69] presented an approach based on PSO called Adaptive PSO. The proposed algorithm works, considering the distance from the goal and obstacle simultaneously. They have compared the proposed algorithm with traditional PSO in terms of distance travelled and time taken to reach the goal in a static environment. The Adaptive PSO performs better than traditional PSO in all types of static environments with varied complexity both in terms of distance and time. Li and Chow [70] discuss their proposed PSO based algorithm, SLPSO. The objective function is formed on the basis of three parameters: degree of collision risk, distance travelled and path smoothness. Simulation as well as real-world experimentation is carried out to validate the system. The simulation was carried out on Gazebo. Through simulation data and experimentation data, it is found out that SLPSO performs better when compared to PSO and GA.
Deepak et al. [71] discuss their PSO based model for the control mobile robot swarm. They have implemented a fitness function to convert the existing PSO into a multi objective algorithm. The fitness function runs on the basis of: distance of each robot from the goal and the nearest obstacle. Simulations were carried out to validate the proposed model in various different environments. The simulation results show that the algorithm is suited for path planning in unknown environments but needs more work to tackle irregular obstacles. Qin et al. [72] propose a novel approach based on the PSO algorithm that uses the MAKLINK graph to demonstrate the working environment of the robot. The simulations are carried out on MATLAB, using Dijkstra as the path planning algorithm. The system is coupled with GA to help in the learning of the system for optimized path planning. The simulation results show considerable improvements over traditional PSO, but the system is capable of further optimization with some parameter variation.
Alam et al. [73] proposes an algorithm to tackle the path planning problem of a mobile robot using the PSO algorithm. They use convex objects as their static obstacles for testing their proposed algorithm. The simulations are carried out in MATLAB with varying position, number, shapes and sizes of the obstacles. The system uses grid lines to find the optimum path to reach the assigned goal. The simulation results show the effectiveness of the system to find the path with optimum or near-optimum path length to reach the goal with varied convex static obstacles. Chen and Li [74] demonstrate their algorithm that is based on the PSO algorithm to control a small swarm of mobile robots. The proposed algorithm is capable of generating smooth paths for the mobile robots to follow using a cubic spline function integration. The system is capable of working in an environment with static obstacles. The system is tested and validated using MATLAB for simulation of the proposed algorithm.
Li et al. [75] discuss the limitations of the existing traditional PSO algorithm and demonstrate their improved PSO algorithm. The proposed algorithm uses parameters like cubic spline function, uniform distribution, inertia weight and learning factor for enhancing the performance of the algorithm. The proposed algorithm solves the time-consuming problem of the traditional PSO algorithm. They demonstrate their results with the help of simulations which show significant decrease in iterations, path length as well as time taken for simulation. Das et al. [76] proposed a novel approach based on the PSO algorithm. The proposed methodology uses a gravitational search algorithm for optimization of the traditional PSO algorithm. In this paper, the system developed by the authors is compared with other hybrid algorithms to test the feasibility of the system. The simulations show that the system developed is better when compared with improved PSO and improved GSA in terms of path planning. Shiltagh and Jalal [77] studied the application of modified PSO algorithm for path planning. They conducted a simulation on MATLAB with varied static maps. The system is capable of sensing when it reaches a dead-end and no path is available for reaching the assigned goal. The modified PSO shows that it is able to perform the path planning tasks with increased speeds and reduced path lengths.
Table 6Analysis of papers on particle swarm optimization
References | Year | Type of work | Hybrid methods implemented | Type of obstacle avoidance | ||
Simulation work | Experimental work | Static | Dynamic | |||
Particle swarm optimization | ||||||
66 | 2018 | + | + | + | ||
67 | 2018 | + | + | + | ||
68 | 2014 | + | + | |||
69 | 2004 | + | + | + | ||
70 | 2020 | + | + | |||
71 | 2006 | + | + | |||
72 | 2020 | + | + | + | ||
73 | 2016 | + | + | + | ||
74 | 2013 | + | + | + | ||
3. Discussion
In the industrial 3.0, mobile robots have played an important role in the automation of industry. The use of mobile robots is carried on to the new age industrial revolution industry 4.0 and will be carried on for their functioning in the upcoming industrial revolutions. For its use, the above discussed AI techniques are playing a crucial role in mobilizing robots. Considering the increasing interest in automation of industry, several conventional as well as nature-based techniques have been discussed in this review. In the proposed review paper, a considerable amount of research papers has been cited in the literature, that are classified as reactive and classical approaches. The complete navigation along with path planning of robots have been studied with the use of AI Techniques such as, FL, DWA, NN, GA, ACO and PSO. Although the industry consists of many more AI Techniques which are being used as a tool for navigation and path planning, but only a selected few techniques have been discussed based on their popularity in the specific field. With the use of these techniques, the time taken for a robot to path its path and reach its goal changes, as each of the techniques has its own benefits in different fields. The capabilities of each AI technique along with its drawbacks have also been discussed along with examples of application areas. Considering the papers reviewed in this research, we can pinpoint that work on hybridizing (coupling with other techniques) fuzzy logic can be carried out in the future. Also, the use of Particle Swarm Optimization can be further done for tackling dynamic obstacles. The hybridizing of every technique becomes critical, as each technique has its drawback. With the help of hybridization, the drawback of the specific technique can be removed by introducing a technique which has the ability to nullify the drawback of the other technique.
Fig. 9Work done in the past decade and before
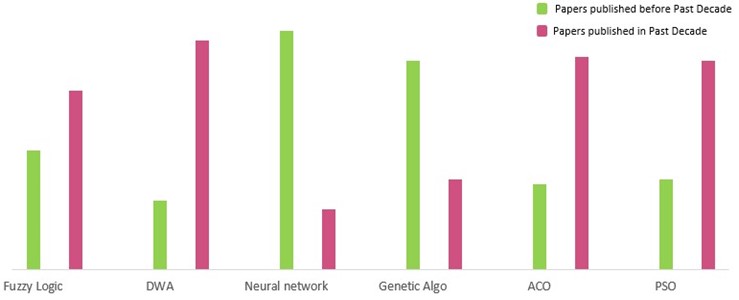
Fig. 10Percentage distribution of work done on the basis of AI techniques
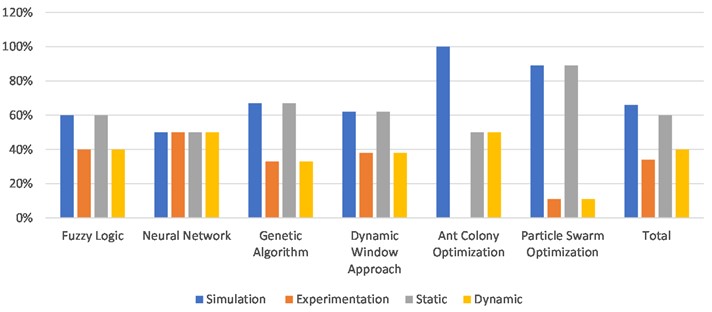
The work done in each domain over the past decade along with comparison with before the past decade is presented graphically in Fig. 9. It can be seen that in the past decade the work carried out in the path planning and navigational domain by using Neural Network and Genetic Algorithm is less as compared to other techniques. These techniques have a large potential as both work on the principle of evolution, which means that these techniques become better as more work is carried out with these techniques. So, the research may consider working in the navigational and path planning domain where the task for the robot is repetitive, the path or the working area remains the same for a large period of time. From the above review, it can be seen that in recent years more work has been done using hybrid approaches as compared to standalone approaches. The increased use of hybrid approaches shows the capability of hybrid approaches to function with providing better results when weighed against standalone approaches. The percentage distribution of papers on the basis of type of work done and type of obstacle avoidance is shown in Fig. 10. From Fig. 10, it is seen that only 34 % of the reviewers have used experimental means, whereas 66 % of the reviewers have done simulation work, for showcasing their techniques. More work can be carried out with the help of experimental demonstration for verifying the capability of their techniques when deployed in the real world. When the experimental verification is carried out for the techniques, real world problems may hamper the working of the techniques, but this provides for the opportunity for the further development of the technique. From Fig. 10, it can also be seen that only 40 % of work is done for tackling dynamic obstacles, whereas 60 % of work is done for tackling static obstacles, using their respective algorithms. The scope for the algorithms for tackling dynamic obstacles is yet to be explored. The distribution of work on the basis of the type of obstacle avoidance used by the authors using the stated AI techniques and the distribution of work on the basis of type of work done by the authors using the stated AI techniques can also be seen in Fig 10.
4. Conclusions
In this paper, the major AI techniques used for path planning of mobile robots have been discussed. The AI techniques are discussed along with the hybridization capabilities for obtaining increased speed in goal completion. The various applications based on simulation as well experimentation for path planning for indoor and outdoor environments have been studied. The following review can be concluded over the following points:
– Researchers can do more work on hybrid algorithms, as the hybrid algorithms have proved to have better performance when compared with standalone algorithms.
– Less experimental work has been carried out and more simulation work is showcased by the researchers.
– DWA, ACO and NN are observed to have an impactful contribution towards dynamic obstacle avoidance.
– The use of PSO for dynamic obstacle avoidance is very nominal in comparison to other algorithms.
– The scope of carrying out experimental work using NN has not been showcased in the papers reviewed.
– More work can be done on the other AI techniques for their significant contribution in mobile robot path planning.
– Many researchers have used the standalone algorithm approach, however, a study found that the hybrid algorithm approach has many advantages over the standalone algorithm approach.
– A wide range of applications have been implemented by the researchers in the reviewed work.
In the future, similar work can be carried out considering the new AI techniques and algorithms. The wide range of hybrid algorithms may be reviewed, which have been seen to be more promising as compared to standalone algorithms. The algorithms may be compared based on metrics such as completeness, optimality and computational complexity. Further, the algorithms may also be segregated based on the different application domains such as logistics, healthcare, agriculture, manufacturing, etc. The proposed work may help the future researchers to find research gap in the field of path planning for mobile robots.
References
-
F. Rubio, F. Valero, and C. Llopis-Albert, “A review of mobile robots: Concepts, methods, theoretical framework, and applications,” International Journal of Advanced Robotic Systems, Vol. 16, No. 2, p. 172988141983959, Mar. 2019, https://doi.org/10.1177/1729881419839596
-
V. Kunchev, L. Jain, V. Ivancevic, and A. Finn, “Path planning and obstacle avoidance for autonomous mobile robots: a review,” in Lecture Notes in Computer Science, pp. 537–544, 2006, https://doi.org/10.1007/11893004_70
-
S. Cebollada, L. Payá, M. Flores, A. Peidró, and O. Reinoso, “A state-of-the-art review on mobile robotics tasks using artificial intelligence and visual data,” Expert Systems with Applications, Vol. 167, p. 114195, Apr. 2021, https://doi.org/10.1016/j.eswa.2020.114195
-
K. Irshat, R. Petr, and R. Irina, “The selecting of artificial intelligence technology for control of mobile robots,” in 2018 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Oct. 2018, https://doi.org/10.1109/fareastcon.2018.8602796
-
Chouhan, Abhijeet Singh, Dayal R. Parhi, and Animesh Chhotray., “Control and balancing of two-wheeled mobile robots using Sugeno fuzzy logic in the domain of AI techniques.,” in Emerging trends in Engineering, Science and Manufacturing, 2018.
-
M. Cirillo, L. Karlsson, and A. Saffiotti, “Human-aware task planning,” ACM Transactions on Intelligent Systems and Technology, Vol. 1, No. 2, pp. 1–26, Nov. 2010, https://doi.org/10.1145/1869397.1869404
-
B. Crnokic, M. Grubisic, and T. Volaric, “Different Applications of Mobile Robots in Education,” arXiv preprint arXiv:1710.03064, 2017.
-
F. R. Noreils, “Toward a robot architecture integrating cooperation between mobile robots: application to indoor environment,” The International Journal of Robotics Research, Vol. 12, No. 1, pp. 79–98, Feb. 1993, https://doi.org/10.1177/027836499301200106
-
M. Bengel, K. Pfeiffer, B. Graf, A. Bubeck, and A. Verl, “Mobile robots for offshore inspection and manipulation,” in 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), Oct. 2009, https://doi.org/10.1109/iros.2009.5353885
-
H. Unger, T. Markert, and E. Müller, “Evaluation of use cases of autonomous mobile robots in factory environments,” Procedia Manufacturing, Vol. 17, pp. 254–261, 2018, https://doi.org/10.1016/j.promfg.2018.10.044
-
Kambam, Pranav Reddy, Rahul Brungi, and G. Gopichand, “Artificial intelligence in robot path planning,” IOSR-Journal of Computer Sciences, Vol. 17, No. 3, pp. 115–119, 2015, https://doi.org/10.9790/0661-1732115119
-
D. R. Parhi, “Advancement in navigational path planning of robots using various artificial and computing techniques,” International Robotics and Automation Journal, Vol. 4, No. 2, pp. 62–65, Apr. 2018, https://doi.org/10.15406/iratj.2018.04.00109
-
M. T. Gaudio, G. Coppola, L. Zangari, S. Curcio, S. Greco, and S. Chakraborty, “Artificial intelligence-based optimization of industrial membrane processes,” Earth Systems and Environment, Vol. 5, No. 2, pp. 385–398, Jun. 2021, https://doi.org/10.1007/s41748-021-00220-x
-
L. A. Zadeh, “Fuzzy sets,” Information and Control, Vol. 8, No. 3, pp. 338–353, Jun. 1965, https://doi.org/10.1016/s0019-9958(65)90241-x
-
A. S. Shitsukane, “Fuzzy logic model for obstacles avoidance mobile robot in static unknown environment,” JKUAT-COPAS, 2022.
-
A. Pandey, R. K. Sonkar, K. K. Pandey, and D. R. Parhi, “Path planning navigation of mobile robot with obstacles avoidance using fuzzy logic controller,” in 2014 IEEE 8th International Conference on Intelligent Systems and Control (ISCO), Jan. 2014, https://doi.org/10.1109/isco.2014.7103914
-
G. Antonelli, S. Chiaverini, and G. Fusco, “A fuzzy-logic-based approach for mobile robot path tracking,” IEEE Transactions on Fuzzy Systems, Vol. 15, No. 2, pp. 211–221, Apr. 2007, https://doi.org/10.1109/tfuzz.2006.879998
-
P. Reignier, “Fuzzy logic techniques for mobile robot obstacle avoidance,” Robotics and Autonomous Systems, Vol. 12, No. 3-4, pp. 143–153, Apr. 1994, https://doi.org/10.1016/0921-8890(94)90021-3
-
A. Saffiotti, E. H. Ruspini, and K. Konolige, “Using fuzzy logic for mobile robot control,” Practical Applications of Fuzzy Technologies, pp. 185–205, 1999, https://doi.org/10.1007/978-1-4615-4601-6_5
-
H. Omrane, M. S. Masmoudi, and M. Masmoudi, “Fuzzy logic based control for autonomous mobile robot navigation,” Computational Intelligence and Neuroscience, Vol. 2016, pp. 1–10, 2016, https://doi.org/10.1155/2016/9548482
-
Xi Li and Byung-Jae Choi, “Design of obstacle avoidance system for mobile robot using fuzzy logic systems,” International Journal of Smart Home, Vol. 7, No. 3, pp. 321–328, 2013.
-
M. Faisal, R. Hedjar, M. Al Sulaiman, and K. Al-Mutib, “Fuzzy logic navigation and obstacle avoidance by a mobile robot in an unknown dynamic environment,” International Journal of Advanced Robotic Systems, Vol. 10, No. 1, p. 37, Jan. 2013, https://doi.org/10.5772/54427
-
N. H. Singh and K. Thongam, “Mobile robot navigation using fuzzy logic in static environments,” Procedia Computer Science, Vol. 125, pp. 11–17, 2018, https://doi.org/10.1016/j.procs.2017.12.004
-
J. Yen and N. Pfluger, “A fuzzy logic based extension to Payton and Rosenblatt’s command fusion method for mobile robot navigation,” IEEE Transactions on Systems, Man, and Cybernetics, Vol. 25, No. 6, pp. 971–978, Jun. 1995, https://doi.org/10.1109/21.384260
-
S.-C. Wang, “Artificial Neural Network,” Interdisciplinary Computing in Java Programming, pp. 81–100, 2003, https://doi.org/10.1007/978-1-4615-0377-4_5
-
Eike Rehder, Jannik Quehl, and C. Stiller, “Driving like a human: imitation learning for path planning using convolutional neural networks,” in International Conference on Robotics and Automation Workshops, 2017.
-
S. Raju, R. M. Raji, S. Shibu, and J. Thomas, “pragmatic implementation of reinforcement algorithms for path finding on raspberry Pi,” in IEEE International Students’ Conference on Electrical, Electronics and Computer Science (SCEECS), Feb. 2022, https://doi.org/10.1109/sceecs54111.2022.9741018
-
L. Zhang, Y. Zhang, and Y. Li, “Path planning for indoor mobile robot based on deep learning,” Optik, Vol. 219, p. 165096, Oct. 2020, https://doi.org/10.1016/j.ijleo.2020.165096
-
O. I. Abiodun, A. Jantan, A. E. Omolara, K. V. Dada, N. A. Mohamed, and H. Arshad, “State-of-the-art in artificial neural network applications: A survey,” Heliyon, Vol. 4, No. 11, p. e00938, Nov. 2018, https://doi.org/10.1016/j.heliyon.2018.e00938
-
Velagic, Jasmin, Nedim Osmic, and Bakir Lacevic., “Neural network controller for mobile robot motion control.,” World Academy of Science, Engineering and Technology, Vol. 47, pp. 193–198, 2008.
-
K.-H. Chi and M.-F. R. Lee, “Obstacle avoidance in mobile robot using Neural Network,” in 2011 International Conference on Consumer Electronics, Communications and Networks (CECNet), Apr. 2011, https://doi.org/10.1109/cecnet.2011.5768815
-
A.-M. Zou, Z.-G. Hou, S.-Y. Fu, and M. Tan, “Neural networks for mobile robot navigation: a survey,” in Advances in Neural Networks – ISNN 2006, pp. 1218–1226, 2006, https://doi.org/10.1007/11760023_177
-
I. Engedy and G. Horvath, “Artificial neural network based mobile robot navigation,” in 2009 IEEE International Symposium on Intelligent Signal Processing – (WISP 2009), p. 2009, Aug. 2009, https://doi.org/10.1109/wisp.2009.5286557
-
Jung et al., “Path planning of mobile robot using neural network,” in Proceedings of the IEEE International Symposium on Industrial Electronics, Vol. 3, 1999, https://doi.org/10.1109/isie.1999.796750
-
S. Nagata, M. Sekiguchi, and K. Asakawa, “Mobile robot control by a structured hierarchical neural network,” IEEE Control Systems Magazine, Vol. 10, No. 3, pp. 69–76, Apr. 1990, https://doi.org/10.1109/37.55127
-
D. Janglová, “Neural networks in mobile robot motion,” International Journal of Advanced Robotic Systems, Vol. 1, No. 1, Mar. 2004, https://doi.org/10.5772/5615
-
N. Noguchi and H. Terao, “Path planning of an agricultural mobile robot by neural network and genetic algorithm,” Computers and Electronics in Agriculture, Vol. 18, No. 2-3, pp. 187–204, Aug. 1997, https://doi.org/10.1016/s0168-1699(97)00029-x
-
M. Seder and I. Petrovic, “Dynamic window based approach to mobile robot motion control in the presence of moving obstacles,” in IEEE International Conference on Robotics and Automation, Apr. 2007, https://doi.org/10.1109/robot.2007.363613
-
Brock, Oliver, and Oussama Khatib, “High-speed navigation using the global dynamic window approach,” in IEEE international conference on robotics and automation, 1999, https://doi.org/10.1109/robot.1999.770002
-
D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robotics and Automation Magazine, Vol. 4, No. 1, pp. 23–33, Mar. 1997, https://doi.org/10.1109/100.580977
-
Tang et al., “An improved dynamic window approach for intelligent pedestrian avoidance of mobile robot,” 2020.
-
L. Xie, C. Henkel, K. Stol, and W. Xu, “Power-minimization and energy-reduction autonomous navigation of an omnidirectional Mecanum robot via the dynamic window approach local trajectory planning,” International Journal of Advanced Robotic Systems, Vol. 15, No. 1, p. 172988141875456, Jan. 2018, https://doi.org/10.1177/1729881418754563
-
S.-A. Li, L.-H. Chou, T.-H. Chang, C.-H. Yang, and Y.-C. Chang, “Obstacle avoidance of mobile robot based on hyperomni vision,” Sensors and Materials, Vol. 31, No. 3, p. 1021, Mar. 2019, https://doi.org/10.18494/sam.2019.2226
-
H. Zhang, C. Zhang, W. Yang, and C.-Y. Chen, “Localization and navigation using QR code for mobile robot in indoor environment,” in IEEE International Conference on Robotics and Biomimetics (ROBIO), Dec. 2015, https://doi.org/10.1109/robio.2015.7419715
-
H. Yang and X. Teng, “Mobile robot path planning based on enhanced dynamic window approach and improved A∗ algorithm,” Journal of Robotics, Vol. 2022, pp. 1–9, Mar. 2022, https://doi.org/10.1155/2022/2183229
-
Y. Li et al., “A mobile robot path planning algorithm based on improved A* algorithm and dynamic window approach,” IEEE Access, Vol. 10, pp. 57736–57747, 2022, https://doi.org/10.1109/access.2022.3179397
-
J. H. Zhang, Q. Feng, A. D. Zhao, W. He, and X. Hao, “Local path planning of mobile robot based on self-adaptive dynamic window approach,” in Journal of Physics: Conference Series, Vol. 1905, No. 1, p. 012019, May 2021, https://doi.org/10.1088/1742-6596/1905/1/012019
-
A. Sgorbissa and R. Zaccaria, “Planning and obstacle avoidance in mobile robotics,” Robotics and Autonomous Systems, Vol. 60, No. 4, pp. 628–638, Apr. 2012, https://doi.org/10.1016/j.robot.2011.12.009
-
X. Yuan, X. Yuan, and X. Wang, “Path planning for mobile robot based on improved bat algorithm,” Sensors, Vol. 21, No. 13, p. 4389, Jun. 2021, https://doi.org/10.3390/s21134389
-
J. Moon, B.-Y. Lee, and M.-J. Tahk, “A hybrid dynamic window approach for collision avoidance of VTOL UAVs,” International Journal of Aeronautical and Space Sciences, Vol. 19, No. 4, pp. 889–903, Dec. 2018, https://doi.org/10.1007/s42405-018-0061-z
-
J. H. Holland, “Genetic algorithms.,” Scientific American, Vol. 267, pp. 66–73, 1992.
-
O. Castillo, L. Trujillo, and P. Melin, “Multiple objective genetic algorithms for path-planning optimization in autonomous mobile robots,” Soft Computing, Vol. 11, No. 3, pp. 269–279, Oct. 2006, https://doi.org/10.1007/s00500-006-0068-4
-
Tu, Jianping, and Simon X. Yang, “Genetic algorithm based path planning for a mobile robot.,” in IEEE International Conference on Robotics and Automation, 2003, https://doi.org/10.1109/robot.2003.1241759
-
A. Tuncer and M. Yildirim, “Dynamic path planning of mobile robots with improved genetic algorithm,” Computers and Electrical Engineering, Vol. 38, No. 6, pp. 1564–1572, Nov. 2012, https://doi.org/10.1016/j.compeleceng.2012.06.016
-
A. Lambora, K. Gupta, and K. Chopra, “Genetic algorithm – a literature review,” in 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Feb. 2019, https://doi.org/10.1109/comitcon.2019.8862255
-
L. Moreno, J. M. Armingol, S. Garrido, A. de La Escalera, and M. A. Salichs, “A genetic algorithm for mobile robot localization using ultrasonic sensors,” Journal of Intelligent and Robotic Systems, Vol. 34, No. 2, pp. 135–154, 2002, https://doi.org/10.1023/a:1015664517164
-
Han, Woong-Gie, Seung-Min Baek, and Tae-Yong Kuc, “Genetic algorithm based path planning and dynamic obstacle avoidance of mobile robots,” in IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, 1997, https://doi.org/10.1109/icsmc.1997.635354
-
Al-Taharwa, “A mobile robot path planning using genetic algorithm in static environment,” Journal of Computer Science, Vol. 4, No. 4, pp. 341–344, Apr. 2008, https://doi.org/10.3844/jcssp.2008.341.344
-
S. Katoch, S. S. Chauhan, and V. Kumar, “A review on genetic algorithm: past, present, and future,” Multimedia Tools and Applications, Vol. 80, No. 5, pp. 8091–8126, Feb. 2021, https://doi.org/10.1007/s11042-020-10139-6
-
M. Kumar, M. Husain, N. Upreti, and D. Gupta, “Genetic algorithm: review and application,” SSRN Electronic Journal, 2010, https://doi.org/10.2139/ssrn.3529843
-
A. Colorni, D. Marco, and M. Vittorio, “A genetic algorithm to solve the timetable problem.,” Politecnico di Milano, Milan, Italy TR, 1992.
-
K. Akka and F. Khaber, “Mobile robot path planning using an improved ant colony optimization,” International Journal of Advanced Robotic Systems, Vol. 15, No. 3, p. 172988141877467, May 2018, https://doi.org/10.1177/1729881418774673
-
Yee Zi Cong and S. G. Ponnambalam, “Mobile robot path planning using ant colony optimization,” in IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Jul. 2009, https://doi.org/10.1109/aim.2009.5229903
-
R. Uriol and A. Moran, “Mobile robot path planning in complex environments using ant colony optimization algorithm,” in 3rd International Conference on Control, Automation and Robotics (ICCAR), Apr. 2017, https://doi.org/10.1109/iccar.2017.7942653
-
W. Gao, Q. Tang, B. Ye, Y. Yang, and J. Yao, “An enhanced heuristic ant colony optimization for mobile robot path planning,” Soft Computing, Vol. 24, No. 8, pp. 6139–6150, Apr. 2020, https://doi.org/10.1007/s00500-020-04749-3
-
F. H. Ajeil, I. K. Ibraheem, A. T. Azar, and A. J. Humaidi, “Grid-based mobile robot path planning using aging-based ant colony optimization algorithm in static and dynamic environments,” Sensors, Vol. 20, No. 7, p. 1880, Mar. 2020, https://doi.org/10.3390/s20071880
-
R. Rashid, N. Perumal, I. Elamvazuthi, M. K. Tageldeen, M. K. A. Ahamed Khan, and S. Parasuraman, “Mobile robot path planning using ant colony optimization,” in 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA), Sep. 2016, https://doi.org/10.1109/roma.2016.7847836
-
Kennedy, James, and Russell Eberhart, “Particle swarm optimization,” in Proceedings of ICNN’95-international conference on neural networks, Vol. 4, 1995, https://doi.org/10.1109/icnn.1995.488968
-
H. S. Dewang, P. K. Mohanty, and S. Kundu, “A robust path planning for mobile robot using smart particle swarm optimization,” Procedia Computer Science, Vol. 133, pp. 290–297, 2018, https://doi.org/10.1016/j.procs.2018.07.036
-
G. Li and W. Chou, “Path planning for mobile robot using self-adaptive learning particle swarm optimization,” Science China Information Sciences, Vol. 61, No. 5, pp. 1–18, May 2018, https://doi.org/10.1007/s11432-016-9115-2
-
B. B. V. L. Deepak, D. R. Parhi, and B. M. V. A. Raju, “Advance particle swarm optimization-based navigational controller for mobile robot,” Arabian Journal for Science and Engineering, Vol. 39, No. 8, pp. 6477–6487, Aug. 2014, https://doi.org/10.1007/s13369-014-1154-z
-
Qin et al., “Path planning for mobile robot using the particle swarm optimization with mutation operator.,” in Proceedings of 2004 International Conference on Machine Learning and Cybernetics, Vol. 4, 2004, https://doi.org/10.1109/icmlc.2004.1382219
-
M. S. Alam, M. U. Rafique, and M. U. Khan, “Mobile robot path planning in static environments using particle swarm optimization,” arXiv preprint arXiv:2008.10000, 2020, https://doi.org/10.48550/arxiv.2008.10000
-
X. Chen and Y. Li, “Smooth path planning of a mobile robot using stochastic particle swarm optimization,” in 2006 International Conference on Mechatronics and Automation, Jun. 2006, https://doi.org/10.1109/icma.2006.257474
-
X. Li, D. Wu, J. He, M. Bashir, and M. Liping, “An improved method of particle swarm optimization for path planning of mobile robot,” Journal of Control Science and Engineering, Vol. 2020, pp. 1–12, May 2020, https://doi.org/10.1155/2020/3857894
-
P. K. Das, H. S. Behera, and B. K. Panigrahi, “A hybridization of an improved particle swarm optimization and gravitational search algorithm for multi-robot path planning,” Swarm and Evolutionary Computation, Vol. 28, pp. 14–28, Jun. 2016, https://doi.org/10.1016/j.swevo.2015.10.011
-
Shiltagh, Nadia Adnan, and Lana Dalawr Jalal., “Optimal path planning for intelligent mobile robot navigation using modified particle swarm optimization.,” International Journal of Engineering and Advanced Technology, Vol. 2, No. 4, pp. 260–267, 2013.
Cited by
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
Conceptualization: Shrinivas Deshpande, Abhishek Kumar Kashyap, Bhumeshwar Patle; Data Curation: Shrinivas Deshpande; Analysis and Interpretation of results: Shrinvas Deshpande; Supervision: Abhishek Kumar Kashyap, Bhumeshwar Patle; Writing-Original Draft Prepartion: Shrinivas Deshpande; Writing-Review and Editing: Abhishek Kumar Kashyap, Bhumeshwar Patle. All authors reviewed the results and approved the final version of the manuscript.
The authors declare that they have no conflict of interest.
