Abstract
The article presents selected components of the prototype of the integrated system of supporting information management in passenger traffic (the polish acronym of the system is ZSIKRP Demonstrator+). The system is equipped with significantly expanded range of offered functionality, which corresponds to the current demands of the market. Additionally, it has features distinguishing it from other products available on the market. Prototypes of the system installed in two versions: for electric (EZT) vehicle (EN57 1756 – type in Mazovia Railways) and diesel (SZT) (SA 132 006 – type in regional public transport) vehicle. ZSIKRP system also focuses on ensuring the safety of travelers in both types of vehicles: EN57 1756 (EZT) and SA 132 006 (SZT). It is done by installation of the collision and threats detection module, thus it will be possible to transfer information about possible emergency situation to supervision center and immediately to crisis management center. Particular attention has been given to test collision and threats detection module and stabilization of measurements.
1. Introduction
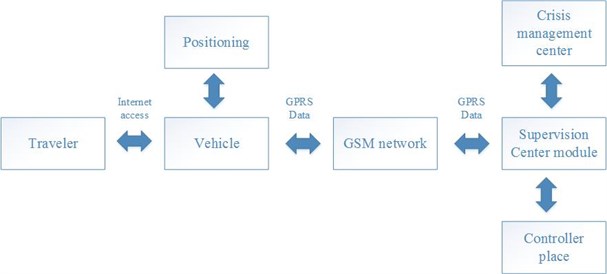
ZSIKRP system (Fig. 1) is a complex system that includes collision and threats detection module [1], which in the event of a disaster helps to substantially minimize its negative effects by immediately providing information to the competent services like: geographic location and size of the disaster. This information consists of: data about the speed of the vehicle at the time of the disaster, data on the number of passengers in the vehicle at the time of the crash, the exact geographical location of the vehicle, recording of cameras and conversations in the driver’s cab shortly before the crash [2]. Precise data allows more efficient planning and carrying out rescue and will help in the search for its causes. The module detects the impact force and the tilt (e.g. rollover, the overturning of a vehicle) of the rail vehicle [3]. Upon detection of a vehicle accident will be immediately sent information about the event to the Supervision Center [4, 5]. In parallel it is possible to send an XML frame to the Crisis Management Center. In order to precisely determine the point of impact to the train, remote collision and threats detection module includes the accelerometer characterized a low sensitivity and a large measurement range, gyroscope, strain gauge bridge was used. Due to the safety functions performed by the collision detection module and threats, the project takes into consideration the redundancy of accelerometers. The project also assumes the possibility of installation of more collision and threats detection modules (separate on front and rear part for electric vehicles or diesel vehicles [6]). Project of the collision and threats detection module on the detection of a collision in front of the vehicle was focused. Module has optional the ability to detect a side impact by use strain gauge bridge. The use of the gyroscope detects the overturning a vehicle. The use of a special algorithm involving the merger of signals from the accelerometer and gyroscope caused stabilization of the acceleration and rotation measurements using complementary filter.
Fig. 1The circulation of information in the ZSIKRP system CPU
2. Test research
In the collision and threats detection module three types of accelerometers are used. Accelerometer/magnetometer 1 (detects the tilt of the vehicle) on the basis of the ADXL362 was made. The accelerometer 2 on the basis of the SCA3100-D07 3D 6 g was made, it characterized by a narrow range, and high sensitivity. The wide measuring range is characterized an accelerometer 3 based on 3 axis ADXL375 system acc 200 g. All accelerometers in three axes , , are operating. The system also uses a gyroscope, on basis of the L3GD20 whose function is to detect the deviation of the vehicle from the axis (rollover, the vehicle overturns).
Fig. 2Practical implementation of integrated systems with collision and threats detection modules for vehicle type a) EN57 1756 – type in Mazovia railways and b) SA 101 003 – type in regional public transport

a)

b)
The results of tests accelerometer to measure the acceleration components in three axes , , and the measuring rotation angle with gyroscope are presented in (Figs. 3, 4).
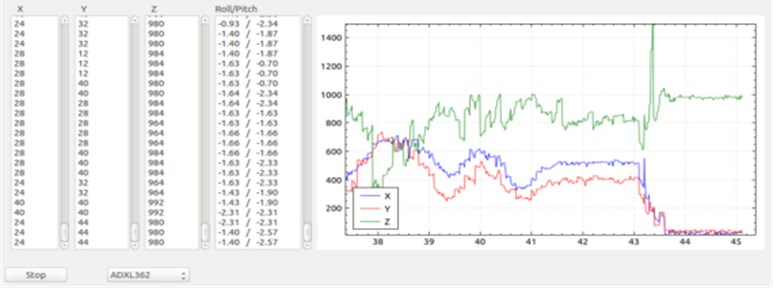
Fig. 3. Measurement of acceleration in each axis , , in subsequent measurement points, -axis scaled in units of [mg] = 0.001 g (1,000 mg = 1 g = 10 m/s2), the axis – next measurement points
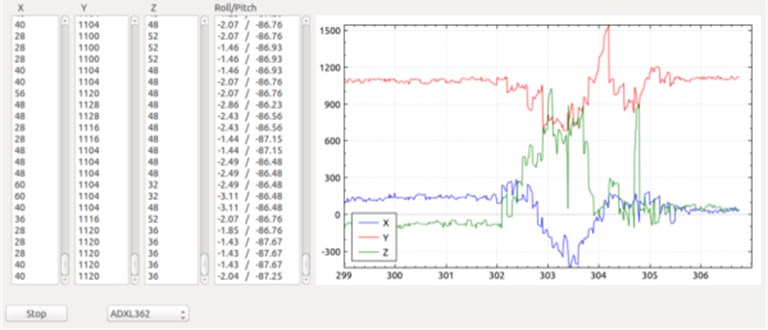
Figure 3 shows the acceleration tests when moving ADXL362 accelerometer module. In measuring steps between 37 and 43 movement module registered. From step 44 came to an end tests – , = 0, while the component from the acceleration is constant and equals 1 g (1000 mg). Figure 4 shows the change in position of the module and displacement of the axis and (module set up vertically) – component is 1,000 mg = 1 g (gravitational acceleration value).
Fig. 4Acceleration observation during module rotation
3. Conclusions
Practical implementation of the ZSIKRP project has allowed us to obtain assurance that produced modules can be used in rolling stock and meet the accepted technical and functional requirements. A series of tests: fast transient SURGE, electrical fast transient, BURST immunity test and electrostatic discharge ESD, electromagnetic compatibility was performed. The reference point parameters defining compliance criteria was the PN-EN 50155 test methodology must also take into consideration the fact that the modules will be installed in rail vehicles Type SA 132 006 (Regional Public Transport) and EN57 1756 (Mazowieckie Railways). The installation site pulls a duty to meet a series of standards (e.g. EN 50155, EN 61373, EN 50121-3-2, EN 60068-2-1, EN 60068-2-2 PN-EN 60068-2-30) and the requirements for electronic devices mounted on the traction vehicles. Conducted within the project functional tests confirmed that constructed functional modules are properly assigned to individual modules at the stage of planning and design. Also communication interfaces and their susceptibility to the influence of environmental conditions, including vibration has been verified. Additional module provided in the vehicle, allowing the exchange of data in the Wi-Fi, using leaky cable technology, enables Internet and Intranet access by passengers. Applied technology ensures also good coverage of the radio signal in interiors of railway vehicles of both electrical and diesel type.
References
-
Hejczyk T., Wszołek B., Gałuszka A. Integration of rail vehicle devices into one module in order to increase passenger safety and comfort. Achieves of Transport System Telematics, Vol. 7, Issue 2, 2014, p. 45-50.
-
Hejczyk T., Wszołek B., Gałuszka A.,Młyńczak J., Burdzik R. Application of safety and communication modules as an integrated intelligent system in rail vehicles. Vibroengineering Procedia, Vol. 3, 2014, p. 105-110.
-
Hejczyk T., Wszołek B., Gałuszka A. The integrated system aided management on passenger information train traffic (ISAMPITT). PAK, Vol. 60, Issue 11, 2014, p. 1033-1036.
-
Gałuszka A., Cabaj P., Rak K. Optimization of running frequency of public transport on the basis of KZKGOP data. Electrotechnical Review, Vol. 86, Issue 9, 2010, p. 106-110.
-
Burdzik R., Węgrzyn T., Wieczorek A. Use of software system aided in technical state monitoring of means of transport. 14th International Conference TransComp, Zakopane, 2010.
-
Mikulski J. Młyńczak J., Surma S. Telematic systems on diesel locomotives. 7th Conference LogiTrans, Logistics, Transport systems, Transport safety, 2010.
About this article
This article is the result of collaboration between ENTE Sp.o.o. Company with and the Silesian University of Technology, the Department of Railway Transport, which jointly operate the Project No. UOD-DEM-1-243/001 funded by the National Research and Development Centre: “Integrated System Supporting Information Management of Railway Passenger Traffic”, which has developed a prototype of an integrated system with a unified service, which guarantees much lower costs, staff training and improving the comfort of use. The Project primarily is focused on the safety of travelers, and a safety resulting from technical conditions in railway transport, as well as in the context of defense against aggression. The Project is financed by the National Research and Development Centre and by the EU European Regional Development Fund under the Operational Program Innovative Economy.
The Polish Patent Office received a patent describing collision and threats detection device, dated 20.11.2014, the number of the P. 410110, “Collision and Threats Detection Device Especially to Rail Vehicles”.
