Abstract
This paper presents of Integrated System of Supporting Information Management in Passenger Traffic (the polish acronym of the system is ZSIKRP Demonstrator+). Currently on the polish and, as far as we know, international market such integrated solution is not developed and proposed. In this concept the final customer, e.g. the manufacturer or carrier company, will install one complete solution instead of multiple different installations that are usually difficult or even impossible to integrate. In our opinion the integration leads to increase in safety level of public transport and to improvement the quality of services offered. The novelty of the system is to provide collision, threats detection and fire alarm system integrated into a single coherent solution. In the collision detection module there is a need to apply devices that are resistant to physical disturbances, such as vibrations or strong fluctuations in temperature. One can either use the sensors made in MEMS technology (Micro-called Electro-Mechanical-Systems or micro-electromechanical) or other solutions made in the form of a monolithic integrated system in a standardized enclosure adopted to SMD mounting standard. A practical example of such a sensor is a new digital accelerometers that have a large measurement range (from ±120 g to ±480 g), and the choice of communication. The implementation of the collision detection module based on a monolithic integrated systems in MEMS technology.
1. Introduction
Monitoring and diagnostics systems are currently developing very intensively. This process promotes the development of MEMS technology using ultrasonic methods and methods based on surface acoustic wave (SAW) [1-4] and planar optical waveguides [5]. This mainly concerns the field of rail vehicles, which devotes more and more attention in scientific publications, standards and regulations due to the need to monitor individual components of the rail vehicle.
Presented in the publication Supporting Information Management System of Railway Passenger Traffic (ZSIKRP) is designed for installation in railway vehicles type EMUs (Electric traction unit) and PCS (Diesel Traction Team – railcar). It allows to broadcast current passenger information, the GPS vehicle position on a digital map, and data transmission [6], for example: in GSM network using GPRS technology, monitoring and recording of video in selected areas of the rail vehicle, counting passenger flows [7], enabling connectivity to the Internet and Intranet.
The proposed system in its current form, due to their functionality, takes into account the safety of passengers [8]. Innovation on a national scale is to integrate in the system collision and threats detection module, and fire alarm module. The system has a modular structure, so there is a possibility of applying it on any number of trains.
2. The concept of collision and threats detection module
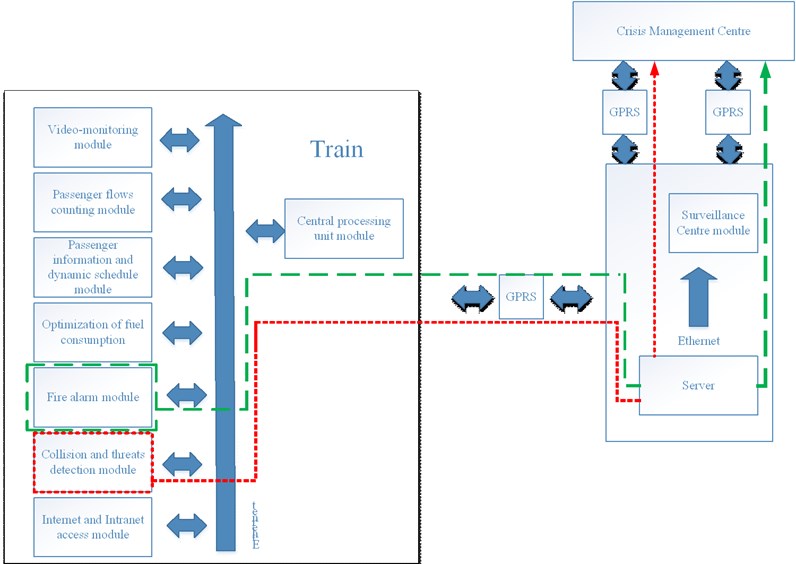
Project ZSIKRP (Fig. 1) addresses the issues of security of passengers. For this purpose an innovative solution for the implementation of collision and threats detection modules, as well as monitoring fire alarm systems are proposed. In the literature there are different methods and devices for detecting obstacles and collision detection. Most often they are based on the use of ultrasonic sensors, containing microcontroller that precisely control the entire process of generation, detection and measurement. However, the range of detection by this method is of limited scope for practical purposes. To locate obstacles are also used radar detectors, resistant to changes of environmental conditions, to detect objects in the contour gauge track at a distance of approx. 100 m from the rail vehicle. Infrared sensors (LIDAR) to detect objects in the contour gauge track at a distance of approx. 40 m in front of the rail vehicle can also be applied. There are also laser methods working in triangulation system. However, their disadvantage is a small range.
Fig. 1ZSIKRP system structure and distribution of collision detection and fire alarm modules
In the case of design and construction of the collision and threats detection module the following two assumptions were made:
1) Detection of collisions with obstacles (after the collision),
2) Detection of collision with the obstacle of much smaller mass (after the collision).
In the case of a collision with an obstacle detection the condition of acceleration sensor installation is elastically mounted bumper. In the case of the sensor mounted on the bumper there is the need to perform crash tests to calibrate the system. The same limitation is related to the solution based on displacement sensors, for example of induction or hallotron type, working in a linear or angular system. An important disadvantage of this solution is the additional element protruding from forehead of the locomotive. Acceleration sensors are made as capacitive sensors in technology of micro-mechanical systems and as piezoelectric sensors.
The capacitive sensing capacitor in a special comb system has fixed and movable plates, which under the influence of acceleration are deviated from a neutral position. It results that a change in capacitance of a capacitor is proportional to acceleration or deceleration. The piezoelectric sensors are based on piezoelectric effect, i.e. producing the electrical charge on walls charged within the limits of elasticity of the piezoelectric crystal. The measure of the acceleration is voltage generated by the sensor, that is proportional to the force on the piezoelectric crystal.
In the collision and threats detection module there is a need to apply devices that are resistant to physical disturbances, such as vibrations or strong fluctuations in temperature. One can either use the sensors made in MEMS technology (Micro-called Electro-Mechanical-Systems or micro-electromechanical) or other solutions made in the form of a monolithic integrated system in a standardized enclosure adopted to SMD mounting standard. A practical example of such a sensor is a new digital accelerometers that have a large measurement range (from ±120 g to ±480 g), and the choice of communication. The implementation of the collision and threats detection module will be in this case associated with the implementation based on a monolithic integrated system. The concept of such solution is presented in the next point. Based on the above considerations, a project and construction of the collision detection module and threats, characterized in that it comprises in its design accelerometers, magnetometers, gyroscopes and strain gauge bridges connected in such a way that enables the detection of a collision after the event of a rail disaster.
Based on the above considerations, a project and construction of the collision and threats detection module has been developed, consisting in its design accelerometers, magnetometers, gyroscopes and strain gauge bridges connected in a way that enables the detection of a collision after the event of a rail disaster.
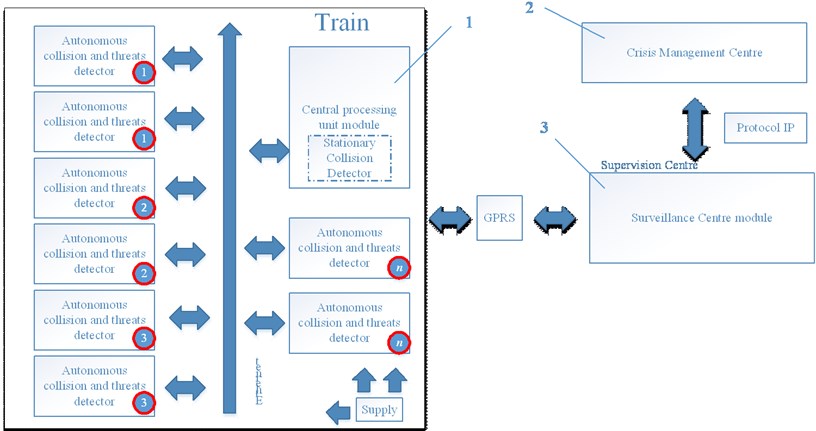
Fig. 2Modus operandi and configuration devices in collision and threats detection module
Collision and threats detection module allows to send important information about the crash/accident by the CPU module and then by the GSM network to the Surveillance Centre module (Fig. 1). After analyzing the data in the software Surveillance Centre module, event information is sent to the Crisis Management Centre (Fig. 1).
The modular unit can be installed in any number (1,..., n) of autonomous modules using the existing Ethernet network, installed in the vehicle (Fig. 2). Network topology is of star type, where the central point is the CPU module (1). For each autonomous collision and threats detector there is one tensometric bridge. In the CPU module (1) stationary collision detector is installed that uses a magnetometer to determine the position of the vehicle. The signals from all devices: autonomous collision and threats detector, tensometric bridge, stationary collision detector in the CPU module (1) are forwarded to the Surveillance Centre (3), where they are automatically interpreted.
In view of the safety functions performed by the collision and threats detection module, the project takes into account the redundancy of accelerometers. The project also envisages the possibility of installing more collision and threats detection modules – separate for front and rear of rail vehicle [9]. In the case of a collision and threats detection module, project activities were focused on the detection of a collision in front of the vehicle. Optional module has the ability to detect impacts to the side of the rail vehicle (tensometric bridge). The use of the gyroscope can additionally detect vehicle roll.
3. Concept of fire alarm module
Fire alarm module plays an important role in the project (Fig. 1). It should allow the transmission of fire alarm information in a vehicle to the Control Centre [11]. Activation of the fire sensor will automatically result in a change in preview of the monitoring system in the cabin of the vehicle driver and will promptly send information and photos of the endangered area to Supervision Centre. The concept of fire alarm module can be considered the use of SAW gas sensor for measuring the concentrations of carbon dioxide and other toxic gases. Diagram of the sensor with a double delay line is shown in Fig. 3. Output signal from the sensor is a signal with a differential frequency Δf, dependent on the value of the measured physical quantity – in the gas sensor – of the concentration of the analyte in the sensor's environment. In the CO gas sensor, for example analyte detection is performed in the sensor cover layer applied on one of the waveguides. As the sensor layer polymeric compounds and metal oxide semiconductor are used.
Fig. 3The system of a sensor with an acoustic surface wave [10]
![The system of a sensor with an acoustic surface wave [10]](https://static-01.extrica.com/articles/15441/15441-img3.jpg)
Fig. 4Detection of toxic gas concentration – response (Δf) CO gas sensor with polyaniline layer of 180 Nm + Nafion, obtained in the evaporation temperature 450°C, measuring temperature 35°C in synthetic air at a concentration range of from 5 to 20 ppm
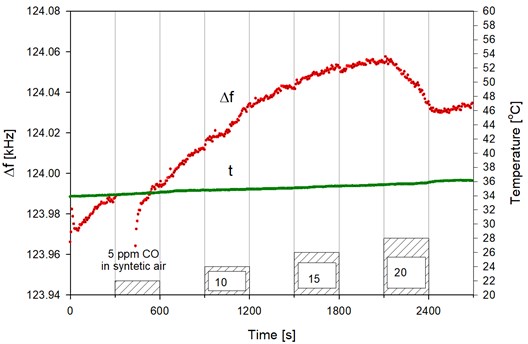
Typical sensors for measuring the concentrations of CO are used, for instance, to detect CO poisoning during fires and also to control the air quality and signaling the crossing of maximum concentration. Fig. 4 shows an example of measurement results of the difference frequency Δf of carbon monoxide (CO) of the SAW type gas sensor for detection at concentrations of from 5 to 20 ppm of the sensor with cover layer: Polyaniline with a thickness of 180 nm with an additional layer of Nafion type [12]. Typically a double oscillator system is used: the measuring oscillator and the reference oscillator (reference), allowing compensation of the influence of confounding factors (temperature, pressure) at the output from the sensor. Measurements of this type have a very high sensitivity. Theoretical sensitivity (mass) oscillator surface acoustic wave (SAW) at a frequency of 100 MHz is approx. 17 Hz/ng/cm2 [12], which, with an active surface of 0.17 cm2 sensor provides a minimum level of detection of 0.2 Ng weight changes. At a frequency of approx. 3 GHz sensitivity of the theory is about 3∙10-15 g.
In the event of a fire hazard, toxic gas poisoning, for example: CO, system can directly communicate important information to the rail vehicle driver (by visual monitoring of the place where there was activation of fire detectors and/or Carbon monoxide sensor). The same information in the form of screenshots is sent to the Surveillance Centre module, and it may be an additional source of verification for the State Fire Service Dispatcher in Crisis Management Centre (2, Fig. 2).
4. Conclusions
Rail carriers should put a clear emphasis on increasing the convenience and comfort of rail travel. At the same time there is a need to modernize the fleet, taking into account the safety aspects of travelers. Despite the modernization of parts of machinery, vehicles still do not fully meet the expectations of passengers travel in comfort and safety. It should be noted that Regulation EC No 1371/2007 European Parliament and of the Council of 23 October 2007, concerning the rights and obligations of rail passengers, covers topics of obligation to care for the personal security of passengers. It also should be noted, that the institution of the President of UTK in Poland takes actions aimed directly and indirectly to improve the safety and quality of services provided by the carrier transport services. The themes that take the design of integrated system ZSIKRP (Fig. 1).
The paper presents a collision and threats detection module, to detect a collision as well as rollover of the vehicle, consisting of a CPU, sensor unit, power supply block, block communication, working in a network having a connection from the Ethernet network to PoE (Power over Ethernet) and the ability to scaling (installation to n pieces on the vehicle, Fig. 2), incorporates the functionality of the “black box”. Shortly characterized fire alarm module with the option of SAW sensors for monitoring the level of concentration of toxic gases, eg. CO at fire detection.
5. Acknowledgments
This article is the result of collaboration between ENTE Sp. o.o. company with and the Silesian University of Technology, the Department of Railway Transport, which jointly operate the project No UOD-DEM-1-243/001 funded by the National Research and Development Centre: “Integrated System Supporting Information Management of Railway Passenger Traffic”, which has developed a prototype of an integrated system with a unified service, which guarantees much lower costs, staff training and improving the comfort of use. The Project primarily is focused on the safety of travelers, and a safety resulting from technical conditions in railway transport, as well as in the context of defense against aggression. Work is carried out under contract with the National Research and Development Centre funds for science in years 2013-2015 as a development project.
References
-
Hejczyk T., Urbańczyk M., Wituła R., Maciak E. SAW sensors for detection of hydrocarbons. Numerical analysis and experimental results. Bulletin of the Polish Academy of Sciences Technical Sciences, Vol. 60, Issue 3, 2012, p. 589-595.
-
Kawalec A., Pasternak M. A new high-frequency surface acoustic wave sensor for humidity measurement. IEEE Transactions on Instrumentation and Measurement, Vol. 57, Issue 9, 2008, p. 2019-2023.
-
Kawalec A., Jasek K.,Pasternak M. Measurements results of SAW humidity sensor with nafion layer. European Physical Journal Special Topics, Vol. 154, 2008, p. 123-126.
-
Jakubik W., Urbańczyk M., Kochowski S., Bodzenta J. Bilayer structure for hydrogen detection in a surface acoustic wave sensor system. Sensors and Actuators B, Vol. 82, 2002, p. 256-271.
-
Struk P., Pustelny T., Gut K., Gołaszewska K., Kaminska E., Ekielski M., Pasternak I., Lusakowska E., Piotrowska A. Planar optical waveguides based on thin ZnO layers. Acta Physica Polonica A, Vol. 116, Issue 3, 2009, p. 414-418.
-
Hejczyk T. The wireless Wimax system for the secure radio data transmission. Measurements Automation and Monitoring, Vol. 59, Issue 7, 2013, p. 692-694.
-
Gałuszka A., Cabaj P., Rak K. Optimization of running frequency of public transport on the basis of KZKGOP data. Electrotechnical Review, Vol. 86, Issue 9, 2010, p. 106-110.
-
Dyl K. Assessment of functioning state railway transport and traffic safety rail, office of rail transport, 2012.
-
Mikulski J. Młyńczak J., Surma S. Telematic systems on diesel locomotives. 7th Conference LogiTrans, Logistics, Transport systems, Transport safety, 2010.
-
Hejczyk T., Urbańczyk M., Jakubik W. P. Semiconductor sensor layers in SAW gas sensors. Acta Physica Polonica A, Vol. 118, 2010, p. 1153-1157.
-
Burdzik R., Węgrzyn T., Wieczorek A. Use of software system aided in technical state monitoring of means of transport. 14th International Conference TransComp, Zakopane, 2010.
-
Urbańczyk M. Sensors with Surface Acoustic Wave. Monograph, Vol. 213, Institute of Physics SUT, Gliwice, 2011.
About this article
