Abstract
Bearings are widely used in rotating machines, and the bearing abnormities have significant effects on the operation of machines. Short-term trend prediction of the bearing is very important for the maintenance decision making. In this paper, a novel bearing short-term prediction method based on SGWT and MLE method is developed. The original data is denoised using SGWT, and the maximum Lyapunov exponent which contains bearing fault characteristic information are calculated, and these characteristic parameters are used to predict the short-term trend of bearing. The effectiveness of this methodology is demonstrated using experimental data.
1. Introduction
Bearings are the basic components of many machines, and the bearing abnormities have significant effects on the operation of machines. As the failures of bearings take some percent of failures on gearboxes failures, bearing trend prediction is very important to prevent the machine failure and save costs.
The incipient faulty feature is often weak and buried in the background signal, so it is difficult for the traditional signal processing method to detect them. Second generation wavelet transform (SGWT), proposed by Wim Sweldens, is a new wavelet construction method using lifting scheme [1]. It can be seen as an alternate implementation of classical discrete wavelet transform. The main feature of SGWT is that it provides an entirely spatial domain interpretation of the transform, as opposed to the traditional frequency domain based constructions. The time-frequency resolution of SGWT varies with the decomposition levels. It gives good time and poor frequency resolution at high-frequency subband, and good frequency and poor time resolution at low-frequency subband. In order to obtain a higher resolution in the high-frequency subband which the faulty characteristics always exist in, second generation wavelet package transform (SGWPT) has been constructed and hence the detail coefficients at each level are further decomposed to obtain their approximation and detail components [2-3]. Unfortunately, SGWPT do not have time invariant property. The decomposition results of a delayed signal are not the time-shifted version of those of the original signal. This may result in the loss of useful faulty information for feature extraction and fault diagnosis. The redundant lifting scheme possesses time invariant property and overcomes the disadvantage of lifting scheme by getting rid of the split step and zero padding of prediction operator and update operator, which makes the approximation and detail signals at all levels are the same length as the original signal [4, 5]. The redundant lifting scheme based wavelet packet transform can not only afford more detailed local time-frequency description of the signal, but also inhibit the frequency aliasing components of the analysis result because of the absence of the split and merge step in the decomposition and reconstruction stage [6]. Consequently, the statistical features extracted from the transform coefficients of RSGWPT have a greater ability to detect the faulty signal.
However, the above mentioned denoising methods are very effective to the system under the assumption that the system is not chaotic system. In engineering practice, especially for complicated system, many systems will have the character of chaos. Therefore, some traditional prediction methods will be ineffective in this circumstance, and chaotic time series prediction method with SGWT needs to be discussed to solve this dilemma, this paper developed a new prediction method based on the second generation wavelet denoising and maximum Lyapunov exponent.
The remaining sections of this paper are organized as follows. In Section 2, framework of the proposed method is introduced. Section 3 describes the experiment and applies the proposed method to bearing defects detecting. Finally, conclusions are given in section 4.
2. Framework of the proposed method
2.1. The second generation wavelet denoising
The second generation wavelet transform, proposed by Wim Sweldens, is a new wavelet construction method using lifting scheme. It can be seen as an alternate implementation of classical discrete wavelet transform. The main feature of the second generation wavelet transform is that it provides an entirely spatial domain interpretation of the transform, as opposed to the traditional frequency domain based constructions [1]. The decomposition stage of SGWT consists of three steps: split, prediction and update.
In the split step, an approximate signal al at level l is split into even samples and odd samples:
In the prediction step, a prediction operator P is designed and applied on al+1 to predict dl+1. The resultant prediction error dl+1 is regarded as the detail coefficients of al:
where, pr are coefficients of P and M is the length of pr.
In the update step, a designed update operator U is applied on dl+1. Adding the result to the even samples, the resultant al+1 is regarded as the approximate coefficients of al:
where, uj are coefficients of U and N is the length of uj.
Iteration of the above three steps on the output a, and then the detail and approximation coefficients at different levels are generated. The reconstruction stage of SGWT is a reverse procedure of the decomposition stage, which includes inverse update step, inverse prediction step and merging step:
The operators P and U are built by means of interpolating subdivision method (ISM) [7]. Choosing different P and U is equivalent to choosing different biorthogonal wavelet filters [8]. The computational costs of the forward and inverse transform are exactly the same.
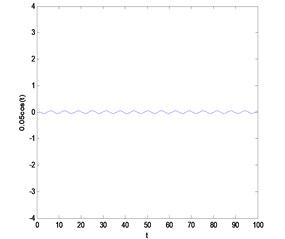
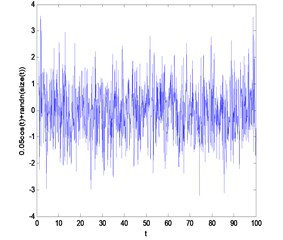
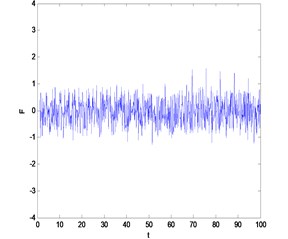
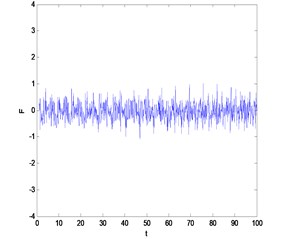
Then, we can take a simulated signal for example to show the denoising efficiency of the second generation wavelet denoising method as shown in Fig. 1. The signal (frequency 1 Hz amplitude F1=0.05) shown on Fig. 1(a) is corrupted with white noise shown on Fig. 1(b) (SNR = –45 dB), and then the denoising effect of the first and the second generation wavelet denoising were shown on Fig. 1 (c) and Fig. 1 (d).
Fig. 1The comparison between the first and the second generation wavelet denoising
a)
b)
c)
d)
2.2. The improved chaotic time series prediction model based on the maximum Lyapunov exponent
As the chaotic time series conceal the dynamic information of chaotic system and the phase space reconstruction method can reveal the dynamic information, we can reconstruct the chaotic oscillator which depicts the trajectory of the chaotic system [9]. Let {x(t)|t=1,2,…,N} be the observed time series, according to Packard [10] and Taken [11], based on the selected embedded dimension m and the time delay τ, we can reconstruct the phase space as follows:
where, i=1, 2,…, M and M=N-(m-1)τ.
According to Taken theorem [11], the embedded dimension m and the time delay τ are the basic parameters of the constructed phase space. Taken assumes that we have an infinite noise-free data set, in which case, we can arbitrarily choose the time delay τ. However, as real data sets are finite and noisy, the choice of the time delay plays an important role in the reconstruction of the oscillator from the scalar time series. If τ is too small, the reconstructed oscillator is compressed along the identity line which is called redundancy. If τ is too large, the attractor dynamics may become causally disconnected which is called irrelevance. Furthermore, the Lyapunov exponent is sensitive to the time delay τ and embed dimension m, the C-C method is used to calculate both the time delay τ and embed dimension m simultaneously which is more accurately than calculate the two items separately. Rosenstein et al. [12] put forward to the small data set method to calculate the largest Lyapunov exponent. This method can make fully used of the usable data, besides it has the advantage of fast operation and easily implement.
Let xi be the point in the original phase space, the maximum Lyapunov exponent is λ1, the delayed time is τ, the embedded dimension is m. Then, we can get the point in the reconstructed phase space:
The following equation will be obtained by the maximum Lyapunov exponent λ1, then:
where, denotes the Euclidean norm, is the nearest neighbourhood point of , is the prediction point.
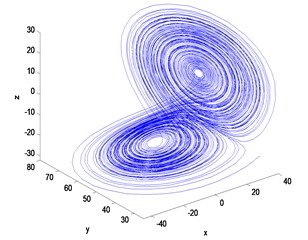
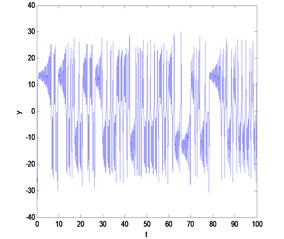
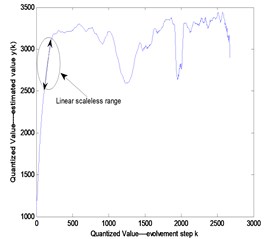
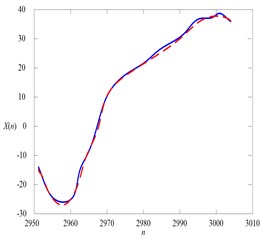
Then, we can take a typical chaotic signal Lorenz for example to show the efficiency of the improved chaotic time series prediction model based on the maximum Lyapunov exponent as shown in Fig. 2. The phase trajectory of Lorenz system is shown in Fig. 2(a), and the time series curve of the variable y in the Lorenz system is shown in Fig. 2(b). Then, the maximum Lyapunov Exponent obtained by small data method can be calculated by using least square method of the labeled scale less line as shown in Fig. 2(c), and the comparison between the real data and the forecasting result is shown in Fig. 2(d).
Fig. 2The comparison between the real data and the forecasting result
a)
b)
c)
d)
3. Case study
3.1. Experimental setup and data acquisition
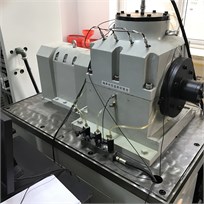
A mechanical test bed in the RCM laboratory of Mechanical Engineering College is used in this research to validate the effectiveness of the proposed method in this paper. The test bearing (6220E) is driven by a 15 KW three phase asynchronous drive motor. In addition, the speed and torque sensors are used to acquire the speed and torque information. These components are connected by couplings, as shown in Fig. 2. The sampling frequency of this experimental system is 20 kHz.
Fig. 3The test rig

3.2. Results analysis and discussion
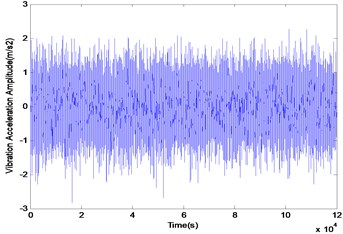
The vibration signal acquired from the test rig is utilized to analyzing according to the method proposed in Section 2. Fig. 4(a) is the original signal without SGWT, and the maximum Lyapunov exponent obtained by small data method can be calculated by using least square method of the labeled scale less line as shown in Fig. 4(b). Fig. 5(a) is the original signal with SGWT, and the maximum Lyapunov exponent obtained by small data method can be calculated by using least square method of the labeled scale less line as shown in Fig. 5(b).
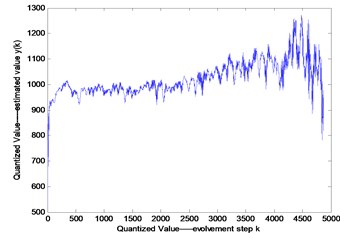
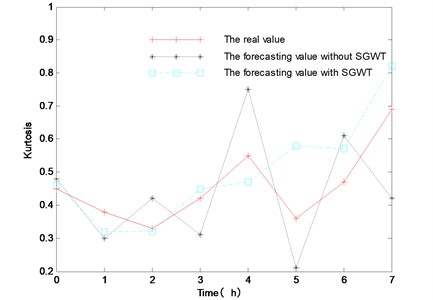
In order to validate the effectiveness of method proposed in this paper, a method based on the second generation wavelet denoising and the maximum Lyapunov exponent is utilized. It can be seen from Fig. 6 that the proposed method can predict the short-term trend of the bearing. So, the effectiveness of the method can be validated.
Fig. 4The original signal without SGWT
a)
b)
Fig. 5The original signal with SGWT
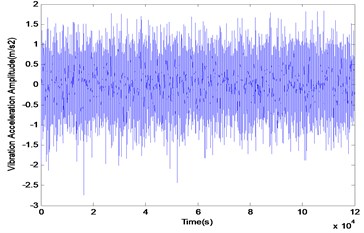
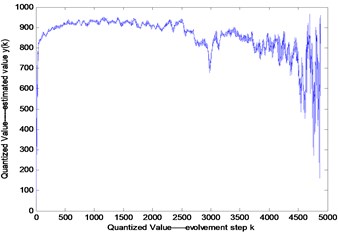
Fig. 6The prediction results of two forecasting methods
4. Conclusions
In this paper, a novel method based on SGWT and MLE is proposed to predict the short-term trend of bearing. In the proposed method, comparing with the first generation wavelet denoising, the SGWT is more effective in denoising. The prediction cycle can be shortened by C-C method which can be used to calculate both the embedded dimension and the time delay . Finally, a bearing test rig is established and the effectiveness of the proposed method and the necessity of SGWT are validated by experimental data.
References
-
Sweldens W. The lifting scheme: a construction of second generation wavelets. SIAM Journal on Mathematical Analysis, Vol. 29, Issue 2, 1998, p. 511-546.
-
Pan Y. N., Chen J., Guo L. Robust bearing performance degradation assessment method based on improved wavelet packet-support vector data description. Mechanical Systems and Signal Processing, Vol. 23, Issue 3, 2009, p. 669-681.
-
Jiang H. K., Wang Z. S. Second generation wavelet packet construction and aircraft engine weak damage identification. Journal of Beijing University of Aeronautics and Astronautics, Vol. 33, Issue 7, 2007, p. 777-780.
-
Lee C. S., Lee C. K., Yoo K. Y. New lifting based structure for undecimated wavelet transform. Electronics Letters, Vol. 36, Issue 22, 2000, p. 1894-1895.
-
Li Z., He Z. J., Zi Y. Y., Chen X. F. Bearing condition monitoring based on shock pulse method and improved redundant lifting scheme. Mathematics and Computers in Simulation, Vol. 7, Issue 3, 2008, p. 318-338.
-
Bao W., Zhou R., Yang J. G., Yu D. R., Li N. Anti-aliasing lifting scheme for mechanical vibration fault feature extraction. Mechanical Systems and Signal Processing, Vol. 23, Issue 5, 2009, p. 1458-1473.
-
Claypoole R. L., Davis G. M., Sweldens W., Baraniuk R. Nonlinear wavelet transforms for image coding via lifting. IEEE Transactions on Image Processing, Vol. 12, Issue 12, 2003, p. 1449-1459.
-
Stepien J., Zielinski T., Rumian R. Image denoising using scale-adaptive lifting schemes. Proceedings of the International Conference on Image, Vol. 3, 2000, p. 288-290.
-
Lv J. H., Lu J. A., Chen S. H. Analysis on Chaotic Time Series and Its Application. Wuhan University Publication, 2005.
-
Packard N. H., Crutchfield J. P., Farmer J. D. Geometry from a time series. Physical Review Letters, Vol. 3, Issue 2, 1980, p. 712-716.
-
Takens F., Rand D. A., Young L. S. Dynamical Systems and turbulence. Lecture Notes in Mathematics, Vol. 4, Issue 2, 1981, p. 336-341.
-
Rosenstein M. T., Collins J. J., De Luca C. J. Reconstruction expansion as a geometry-based framework for choosing proper delay times. Physica D: Nonlinear Phenomena, Vol. 6, Issue 8, 1994, p. 82-98.
About this article
