Abstract
Diacoptical topological models of algorithms analysis describes the tape transportation mechanism with the account of the distribution of options of tape and fast algorithms for obtaining the characteristic polynomial of the transfer function of the system and for graphs of finite element model of the tape for two-node cubic and rod finite elements.
1. Topological models of tape transportation mechanism (TTM)
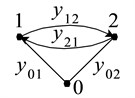
When considering the longitudinal vibrations in the tape path, the tape transportation mechanism [2] assumed that the portion of the tape is represented by two-node rod finite elements (Fig. 1). Sampling ribbon cable is provided so that finite elements nodes coincide with the fixed supports and lumped tape transportation mechanism. Fig. 2 and 3 shows the graph of two-node finite elements and a finite graph model of a tape portion.
Fig. 1Two-node rod finite elements
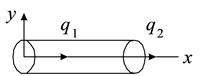
Fig. 2Directed graph two-node finite elements
Matrix stiffness, mass and damping finite elements have the form:
where h0 – specific damping coefficient; ρ – density of tape material; γ – proportionality factor.
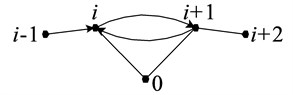
When preparing a formalized description of the graph finite elements model, the tape section is broken by directed graph on unimodal part as shown in Fig. 3. Fig. 4 shows a single-humped portion of the graph γi – for the i-th vertex, which contains only the edges, entering the i-th vertex. Obviously, all unimodal parts of the graph, except in extreme, have the same structure, which is described by using the vertex sets as follows: τi={0,i-1,i+1}.
A set of weights of edges for the i-th vertex: Yi={y0i,yi-1,i,yi+1,i}.
Fig. 3Directed graph finite elements model of section tape for two-node finite elements
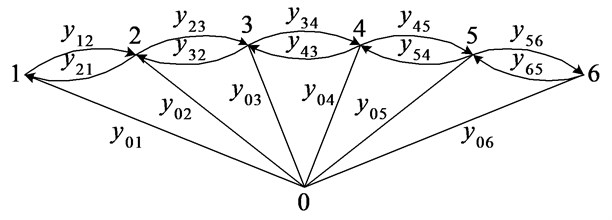
Fig. 4Unimodal part of graph γi
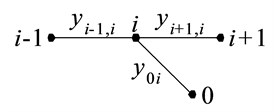
Fig. 6Graph of cubic finite elements
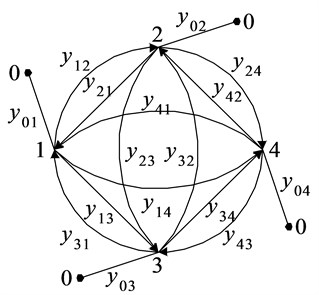
Fig. 5Part of graph γi,i+1
Weight functions of edges are defined by elements of matrixes of masses, stiffness and damping:
Since characteristic polynomial unimodal part γi is obtained by adding the weights of the edges of the set Yi, then it follows that they are equal to each other. As variable parameters, you can use the characteristics of finite elements m0, E, S, h0, ρ, γ or some of them. It is also possible, knowing the dependence of the properties of the interested tape parameter of the designer, such as tension belts, to express a parametric function of edges via this parameter.
2. Algorithm for obtaining characteristic polynomial
The preparation of characteristic polynomial subgraph consisting of n unimodal parts γi is produced according to the formula:
where ⊗ is a sign of multiplying the characteristic polynomial special rules.
Consider the multiplication of two parts of the characteristic polynomial finite element graph γi and γi+1. It can be shown that the set of tuples KOR2 for part γi,i+1 (fig. 5) consists of six tuples. Indeed:
Many tuples KOR1 are obtained by combining elements of vertex sets τi and τi+1. Using conversion rules tuples and isolation circuits, we obtain a set of tuples γi,i+1:
The conversion process and tuples corresponding table TU1 multiplication are shown in Tables 1 and 2.
For any portion of the graph γi,i+1,…,i+j, unimodal joining part formed γi+j of the graph to γi,i+1,…,i+j-1:
The induction method can prove that the set of tuples γi,i+1,…,i+j also has six tuples:
Table 1Formation of tuples γi,i+1 finite element technology model for two-node finite element
Sets of tuples KOR1 | Sets of tuples KOR1 after replacing elements | Sets of tuples KOR2 | Serial number |
(0, 0) | (0, 0) | ||
(0, i) | (0, 0) | ||
(0, i + 2) | (0, i + 2) | ||
(0, i – 1, 0) | (i – 1, 0) | ||
(i – 1, i) | (i – 1, i – 1) | ||
(i – 1, i + 2) | (i – 1, i + 2) | ||
(i + 1, 0) | (0, 0) | ||
(i + 1, i) | – | ||
(i + 1, i + 2) | (i + 2, i + 2) | ||
(0, 0) | 1 | ||
(0, i + 2) | 2 | ||
(i – 1, 0) | 3 | ||
(i – 1, i – 1) | 4 | ||
(i – 1, i + 2) | 5 | ||
(i + 2, i + 2) | 6 |
Thus, at each stage, the multiplication of characteristic polynomial of sets of tuples KOR2 is identical. Table multiplication tuples TU2 are also constant and are presented in Table 3.
Table 2Multiplication table TU1 after multiplication Hγi×Hγi+1
mτi | mτi+1 | ||
1 | 2 | 3 | |
1 | 1 | 1 | 2 |
2 | 3 | 4 | 5 |
3 | 1 | 0 | 6 |
Table 3Multiplication table TU2 after multiplication Hγi,i+1,…,i+j×Hγi+j
n | mτi+j | ||
1 | 2 | 3 | |
1 | 1 | 1 | 2 |
2 | 1 | 0 | 2 |
3 | 3 | 3 | 5 |
4 | 3 | 4 | 5 |
5 | 3 | 0 | 5 |
6 | 1 | 0 | 6 |
Based on the above, a fast algorithm for obtaining partial characteristic polynomial finite element topology model is proposed for the two-node portion of the tape core finite elements.
Step 1. Set the number N of finite elements section of tape.
Step 2. Calculate the number n=N-1 of unimodal parts subgraph containing all the vertices except the final one.
Step 3. We introduce the set U=(U1,U2,…,UR) of variable parameters of finite elements.
Step 4. Construct parametric function of edges unimodal parts γi in a finite element model.
Step 5. Form the characteristic polynomial part of H(γi) unimodal parts γi in an ordered set of terms SL(γi) and a set of numbers M(γi), defining elements of vertex sets τi, of appropriate term characteristic polynomial.
Step 6. i = 2.
Step 7. Form the characteristic polynomial portion H(γi,i+1)=H(γi)⊗H(γi+1) for a plurality of numbers of tuples MKOR(γi,i+1) and a plurality of SL(γi,i+1) using the multiplication table (Table 2).
Step 8. j = 2.
Step 9. Form the characteristic polynomial portion γi,i+1,…,i+j according to the formula
For a set of terms SL(γi,i+1,...,i+j) and a set of corresponding numbers of tuples MKOR(γi,i+1,...,i+j) using multiplication tables tuples TU2(table 3).
Step 10. j = j+1.
Step 11. If j = n – 1, then go to step 9 otherwise to step 12.
Step 12. The work end.
Increased performance of the algorithm is carried out by: identity unimodal parts as input formalized description and the formation of characteristic polynomial unimodal parts γi done once; lack of stage definition w1 and KOR2 after multiplication of partial characteristic polynomial; there is no need to form the multiplication tables at each stage of the multiplication of characteristic polynomial.
3. TTM topological model in study of flexural vibrations portions of tape
When considering the flexural vibrations of the tape portion is represented by cubic core finite elements with two internal nodes. Elastic bending line in this case is described by a polynomial of the third degree. Matrixes of masses and stiffness of the cubic finite elements have dimension 4×4.
Fig. 7Graph of finite elements model of tape section using cubic finite elements
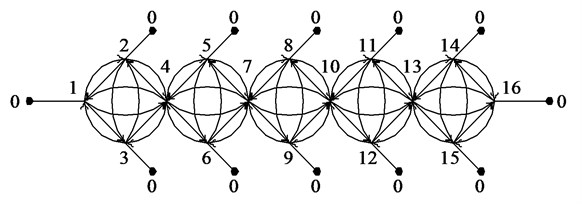
Fig. 8Graph of three vertices of finite elements model for cubic finite elements
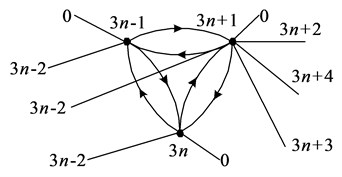
Fig. 9Graph of unimodal parts γ1
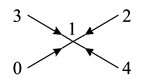
Fig. 10Graph of unimodal parts γN
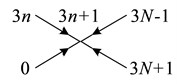
Fig. 11Graph of unimodal parts γ3n-1
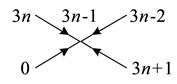
Fig. 12Graph of unimodal parts γ3n
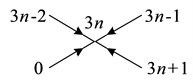
Fig. 13Graph of unimodal parts γ3n+1
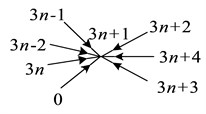
Fig. 6 is a graph of the cubic finite elements, and Fig. 7 shows a graph of the finite-element model of tape section, consisting of a few cubic finite elements. Divide the graph into parts, cutting the arcs of the graph lines 0Aj, as shown in Fig. 7. It is easy to note that the graph represents the connection of three vertex parts of the same structure shown in Fig. 8, except for the final part of the graph. Unimodal part of the graph to the end vertices are shown in Fig. 9 and 10. The characteristic polynomial graph finite elements model can be obtained by multiplying its parts to characteristic polynomial by the formula:
where N – number of finite elements, n – serial number of finite element.
In turn, the three-vertex graph γ3n-1,3n,3n+1 divided by unimodal part of γ3n-1, γ3n-1, γ3n+1 shown in Figs. 11-13. Vertices of the set of parts are respectively:
τ3n+1={0,3n-2,3n-1,3n,3n+2,3n+3,3n+4}.
Sets of weights of the edges unimodal parts are equal:
Y3n={y0,3n,y3n-2,3n,y3n-1,3n,y3n+1,3n},
Y3n+1={y0,3n+1,y3n-2,3n+1,y3n-1,3n+1,y3n,3n+1,y3n+2,3n+1,y3n+3,3n+1,y3n+4,3n+1},
where y0,3n-1=m22p2+c22, y3n-1,3n=m23p2+c23, y3n+2,3n+1=m21p2+c21, y3n-2,3n-1=m12p2+c12, y3n+1,3n=m43p2+c43, y3n+3,3n+1=m31p2+c31, y3n,3n-1=m32p2+c32, y0,3n+1=m44p2+c44, y3n+4,3n+1=m41p2+c41, y3n+1,3n-1=m42p2+c42, y3n-2,3n-1=m14p2+c14, y0,3n=m33p2+c33;y3n-1,3n+1=m24p2+c24, y3n-2,3n=m13p2+c13, y3n,3n+1=m34p2+c34.
Partial characteristic polynomials three-vertex parts are obtained by multiplying the characteristic polynomial unimodal parts.
Multiplication by the formulas (9) and (12) makes it possible to develop an effective algorithm for obtaining the characteristic polynomial of the finite element model for cubic finite elements.
When developing an algorithm, the following was considered:
1) the set of tuples KOR2, obtained by combining of parts γ3n-1 and γ3n, consists of 9 tuples, and the corresponding table multiplication TU1 (Table 4) is a constant for all three-vertex of parts;
2) the set of tuples KOR2, obtained by combining of parts γ3n-1 and γ3n, and the corresponding table multiplication TU2 (Table 5) is a constant, the number of tuples is equal to 35;
3) sets of w1 and w2, and three-vertex part of γ3n-1,3n,3n+1 are equal w1={3n-1,3n,3n+1}, w2={3n-2,3n+2,3n+3,3n+4}.
4) when multiplying the characteristic polynomial three-vertex parts H(γ3n-1,3n,3n+1), the formation process of tuples happens by special rules, except that a plurality of tuples formed by a combination of the sets of tuples KOR2 of these parts.
Table 4Multiplication table TU1 after multiplication Hγi×Hγi+1
mτi | mτi+1 | |||
1 | 2 | 3 | 4 | |
1 | 1 | 2 | 1 | 3 |
2 | 4 | 5 | 5 | 6 |
3 | 1 | 5 | 0 | 9 |
4 | 7 | 8 | 9 | 9 |
Table 5Multiplication table TU2 after multiplication Hγi,i+1×Hγi+2
n | m | ||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | |
1 | 1 | 2 | 1 | 1 | 3 | 4 | 5 |
2 | 6 | 7 | 6 | 7 | 8 | 9 | 10 |
3 | 1 | 7 | 1 | 0 | 11 | 12 | 13 |
4 | 14 | 15 | 15 | 14 | 16 | 17 | 18 |
5 | 19 | 20 | 20 | 20 | 21 | 22 | 23 |
6 | 14 | 20 | 20 | 0 | 24 | 25 | 26 |
7 | 1 | 15 | 0 | 1 | 27 | 28 | 29 |
8 | 6 | 20 | 0 | 20 | 30 | 31 | 32 |
9 | 1 | 20 | 0 | 0 | 33 | 34 | 35 |
Similarly, it is possible to construct algorithms for other types of finite elements, taking into account the peculiarities of topological models of specific types of finite elements.
Also the algorithm of topological analysis of a dynamic model of the tape transport mechanism, is represented as a set of lumped masses [4] related to the tape portion, the example of the longitudinal tape vibrations, presenting it as a two-node areas rod finite elements.
These characteristic polynomial of the transfer function of the system and discrete-continuous model [5] is presented in the form of a plurality of predetermined functions of variable parameters U={UKE,UD}. With the expression of the characteristic polynomial and the transfer function of the system in alpha-numeric form, as a function of the actual parameters of the tape transport mechanism can obtain the frequency equation, the frequency characteristics of the tape transport mechanism – the amplitude-frequency characteristic, the logarithmic amplitude-frequency characteristic, the phase-frequency characteristic, spending optimal synthesis parameters of tape transport mechanism.
4. Conclusion
The synthesis method of tape transport mechanisms, including the identification of a dynamic model of the tape transportation mechanism, the construction of a topological model, formalized description and analysis of diacoptical models of the tape transport mechanism with lumped and distributed parameters, as well as the synthesis method of the tape transport mechanism parameters for the frequency spectrum were developed [1, 3].
An efficient algorithm diacoptical analysis, enabling you to get characteristic polynomial and PPS systems as function parameters for focused and undirected graphs, was provided.
It is the best way to describe the structure of the graph parts with a plurality of the internal connection of the vertices and the set of tuples consisting of external connecting vertices and zero vertex, allowing reducing the count description and simplifying the process of contours finding.
The concept of edges is introduced in the form of a multi-dimensional polynomial function of variable parameters, which gives a great opportunity in the choice of the designer’s investigated parameters of the system.
Fast algorithms for topological analysis of graphs of finite element models of the carrier sites for different types of finite elements are developed allowing for minimal time to obtain the transfer function of the system of a graph as a function of parameters finite elements.
The dynamic and topological model of the tape transportation mechanism is identified as a discrete-continuous system and an effective algorithm is proposed for obtaining characteristic polynomial and the system transfer function based on the diacoptical analysis allows taking into account the carrier distribution parameters.
References
-
Elkin V. S., Lyalinv E. Analysis of methods of spectral synthesis of conservative dynamical systems. VestnikISTU: Mathematical Modeling of Radio-Electronic Means of Telecommunication Systems, Izhevsk, 2002, p. 29-35, (in Russian).
-
Elkin V. S., Nistyuk A. I. Algorithms analysis of diacoptical topological models plots tape carrier-playback recording equipment VestnikISTU: Intelligent Information Technology in Telecommunications and Telemetry, Izhevsk, 2002, p. 34-38, (in Russian).
-
Elkin V. S., Nistyuk A. I. Methods and algorithms for synthesis of dynamic systems of frequency spectrum. VestnikISTU: Mathematical Modeling of Radio-Electronic Means of Telecommunication Systems, Izhevsk, 2002, p. 28-33, (in Russian).
-
Elkin V. S., Nistyuk A. I., Lyalin V. E. A formal description of algorithm and analysis diacoptical topological models of dynamic systems with lumped parameters. VestnikISTU: Mathematical Modeling of Radio-Electronic Means of Telecommunication Systems, Izhevsk, 2002, p. 35-42, (in Russian).
-
Elkin V. S. Formal description of algorithm and diacoptical analysis of discrete-continuous model of dynamic system information registrar. VestnikISTU: Mathematical Modeling of Radio-Electronic Means of Telecommunication Systems, Izhevsk, 2002, p. 43-44, (in Russian).
-
Chua L. O. Chen Li-Kuan Diacoptic and generalized hybrid analysis. IEEE Transactions on CAS, Vol. 23, Issue 12, 1976, p. 694-705.
About this article
